|
RESEARCH INTERESTS
- Human-Centric
Engineering
- Bioengineering, Biomechanics, Bio-Inspired Systems
- Spine Biomechanics
- Healthcare Engineering
- Robotics
- Computer-Aided Design and Simulation of Mechanical Systems
- Vehicle Dynamic Systems/Autonomous Vehicle
·
Human-Centric
Engineering
To
develop digital human models for various engineering applications (1)
Engineering design, (2) injury prevention.
|
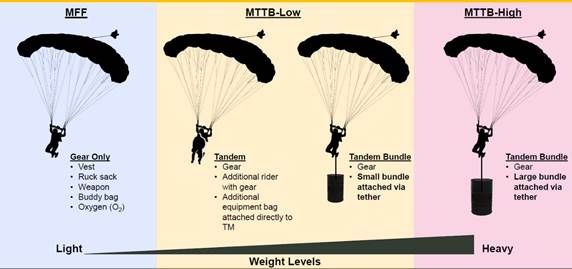
Parachute Health Hazard Effects
Parachute open shock injury, Parachute
landing injury
|
|
|
|
Military
Free Fall (MFF), Military Tethered Tandem Bundle (MTTB)
Publications:
1. Baus, J., Rooks, T.F.,
Tharion, W., J., Hoyt, R., French Krahn, H.A., Yang, J., Inverse Kinematics
Analysis Based on Parachute Jumpers' Inertial Measurement Units (IMUs)
Data, Abstract at the 61st SAFE Symposium, Oct. 10-12, 2023,
Virginia Beach, VA, USA.
2. Baus, J., Rooks, T.F.,
Tharion, W., J., Hoyt, R., French Krahn, H.A., Yang, J., Musculoskeletal Model-Based Neck Generalized Force
Estimation during Parachute Opening Shock with and without a Bundle, Abstract at the 61st SAFE Symposium,
Oct. 10-12, 2023, Virginia Beach, VA, USA.
|
|
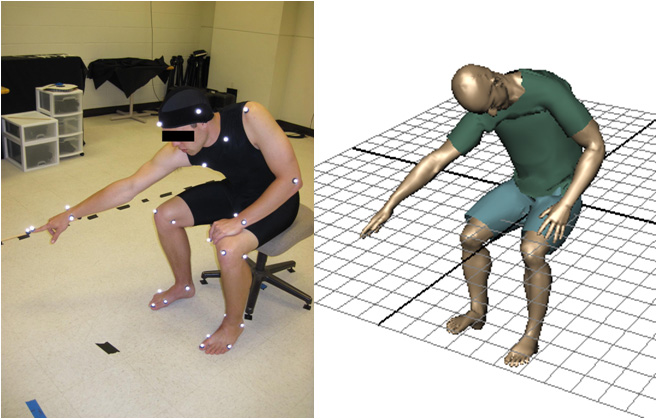
Seated Posture
Prediction
|
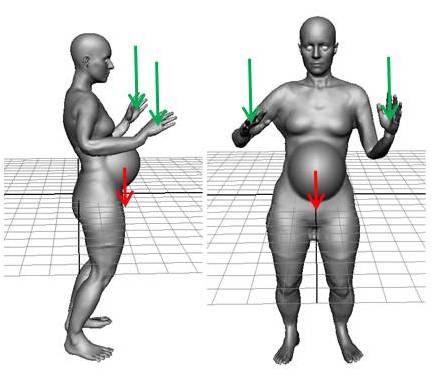
Standing Posture Prediction
|
|
|
|
|
Publications:
1.
Howard, B., Cloutier,
A., and Yang, J.,
Physics-Based Seated Posture Prediction for Pregnant Women and Validation
Considering Ground and Seat Pan Contacts, Transactions of ASME Journal of
Biomechanical Engineering, Vol 134, Issue 7, 2012, 071004-1-10. DOI
2.
Howard, B., and Yang, J., A New
Stability Criterion for Human Seated Tasks with Given Postures, International Journal of Humanoid
Robotics, Vol. 9, No. 3, 2012, 1250015 (24 pages). DOI
3.
Yang, J., Howard, B.,
Cloutier, A., and Domire, J.Z., Vertical Ground Reaction Forces for Given Human
Standing Posture with Uneven Terrains: Prediction and Validation, IEEE Transactions on Human-Machine
Systems, Vol. 43, No. 2, 2013, 225-234. DOI
4.
Gragg, J., and Yang, J., Digital Human Forward Kinematic and
Dynamic Reliabilities, ASME Journal
of Mechanical Design, Vol. 135, Issue 7, 2013, 071008 (10 pages). DOI
5.
Howard, B., and Yang, J., Calculating Support Reaction
Forces in Physics-Based Seated Posture Prediction for Pregnant Women, International Journal of Robotics and
Automation, Vol. 27, No. 2, 2012, 247-260. DOI
6.
Gragg, J., Yang, J., Cloutier,
A., and Pena-Pitarch E., Effect of Link Length Determination on Posture
Reconstruction, Applied
Ergonomics, Vol. 44, Issue 1,
2013, 93-100. DOI
7.
Yang, J.,
Marler, T., and Rahmatalla, S., Multi-Objective Optimization-Based Method
for Kinematic Posture Prediction: Development and Validation, Robotica, Vol. 29, Issue 2, 2011, 245-253. DOI
8.
Mi, Z., Yang, J.,
and Abdel-Malek, K., Optimization-Based Posture Prediction for Human Upper
Body, Robotica, Vol.
27, Issue 4, 2009, 607-620. DOI
9. Marler, T., Arora, J.S., Yang, J., Kim, H., and Abdel-Malek, K.,
Use of Multi-objective Optimization for Digital Human Posture Prediction, Engineering
Optimization, Vol. 41, Issue 10, 2009, 925-943. DOI
|
|
|
|
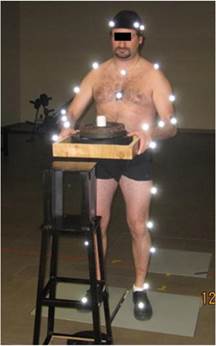
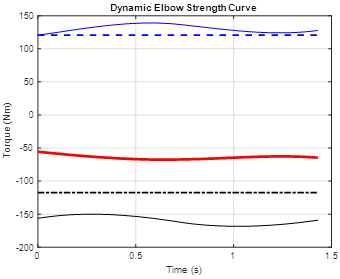
Motion Prediction: Box Lifting
|
|

|
|
Publications:
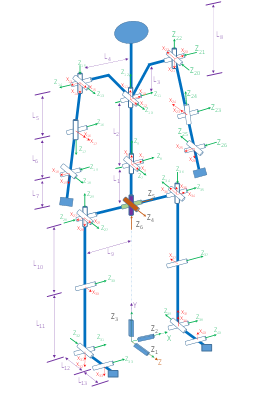
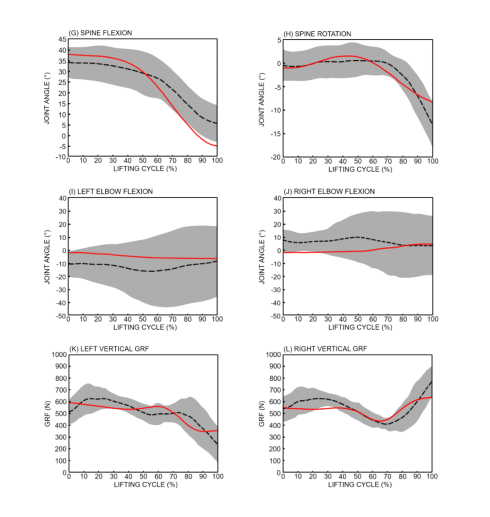
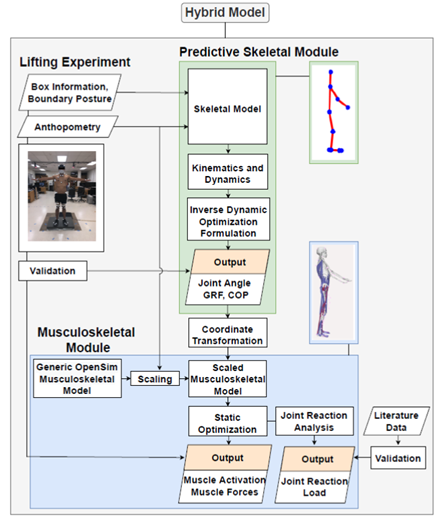
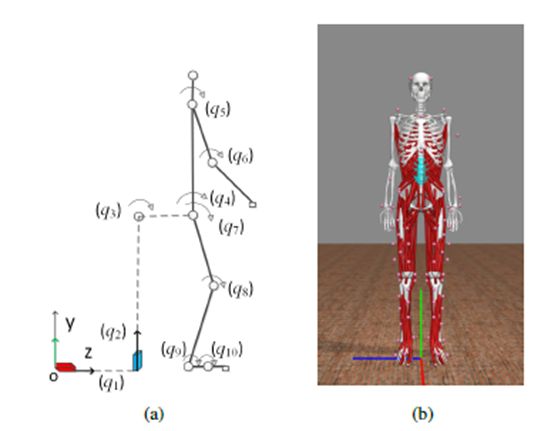
1. Zaman, R., Xiang,
Y., Rakshit, R., and Yang, J.,
Hybrid Predictive Model for Lifting by Integrating Skeletal Motion
Prediction with an OpenSim Musculoskeletal Model, (in press) IEEE
Transactions on Biomedical Engineering. DOI
2. Zaman, R., Xiang,
Y., Cruz, J., and Yang, J., Two-Dimensional versus
Three-Dimensional Symmetric Lifting Motion Prediction Models: A Case Study,
ASME Journal of Computing and
Information Science in Engineering, Vol. 21, 2021, 044501 (7 pages). DOI
3. Xiang, Y., Tahmid, S., Owens, P., Yang,
J., Single
Task-Based Optimization for Planar Symmetric Box Delivery Motion Prediction
and Experimental Validation, ASME
Journal of Mechanisms and Robotics, 13(2), Apr
2021, 024501 (6 pages). DOI
4. Xiang, Y., Tahmid,
S., Owen, P., and Yang, J., Two-Dimensional
Symmetric Box Delivery Motion Prediction and Validation: Subtask-Based
Optimization Method, Applied Sciences, 10, 8798, 1-14, 2020. DOI
5. Zaman, R., Xiang,
Y., Cruz, J., and Yang, J., Three-Dimensional Asymmetric
Maximum Weight Lifting Prediction Considering Dynamic Joint Strength, IMechE,
Part H: Journal of Engineering in
Medicine, 235(4), 437-446,
2021. DOI
6. Xiang, Y., Cruz,
J., Zaman, R., and Yang, J.,
Multi-Objective Optimization for Two-Dimensional Maximum Weight Lifting
Prediction Considering Dynamic Strength, Engineering Optimization,
53(02), 2021, 206 – 220. DOI
7. Rakshit, R., Xiang,
Y., and Yang, J., Dynamic
Joint Strength-Based Simulation for Two-Dimensional Symmetric Maximum
Weight-Lifting Simulation: Model Development and Validation, Proceedings
of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine,
234(7), 2020, 660-673. DOI
8. Xiang, Y., Zaman,
R., Rakshit, R., Yang, J.,
Subject-Specific
Strength Percentile Determination for Two-Dimensional Human Symmetric Lifting
Prediction Considering Dynamic Joint Strength, Multibody System Dynamics, 64(1), 63-76, 2019. DOI
|
|
|
|
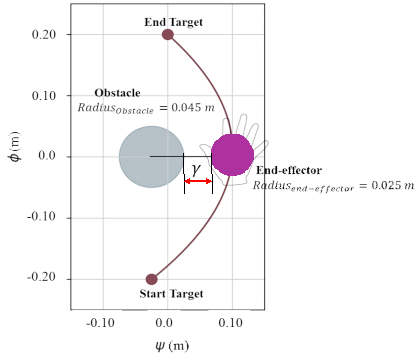
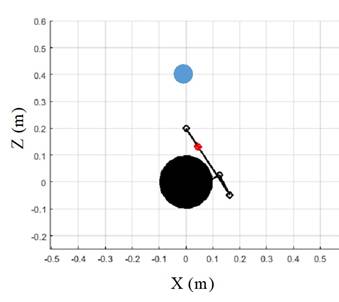
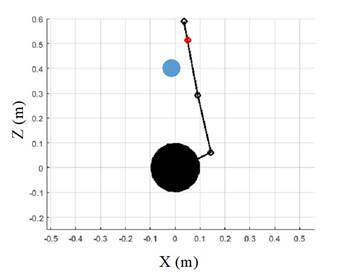
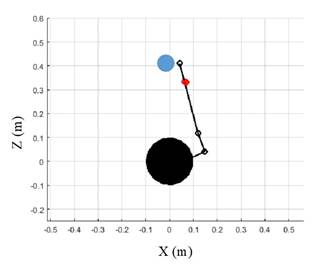
Motion Prediction: Collision Avoidance
|
|
|
|
Publications:
1. Yang, J., Howard, B., and Baus, J., A Collision Avoidance
Algorithm for Human Motion Prediction Based on Perceived Risk of Collision:
Part 2 - Application, (in press) IISE Transactions on Occupational
Ergonomics and Human Factors. DOI
2. Yang, J., Howard, B., and Baus, J., A Collision Avoidance
Algorithm for Human Motion Prediction Based on Perceived Risk of Collision:
Part 1 - Model Development, (in press) IISE Transactions on Occupational
Ergonomics and Human Factors. DOI
|
|
|
|
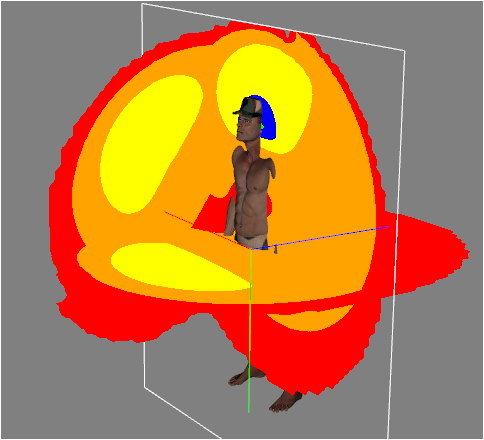
Reach Zone Differentiation
|
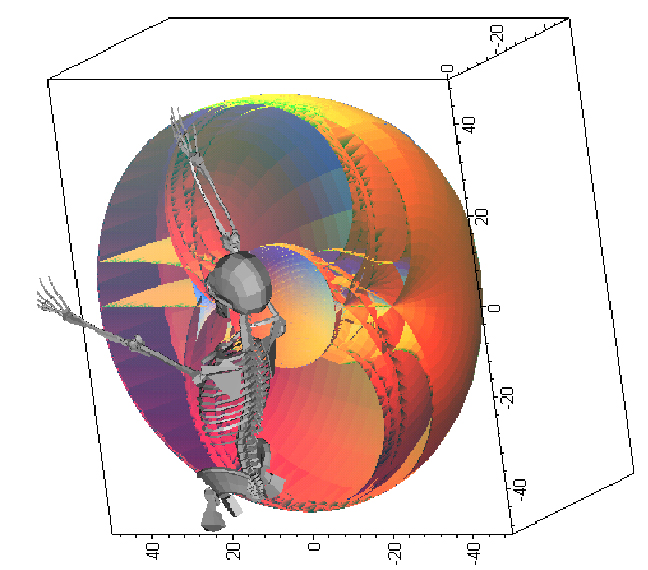
Reach Envelope
|
|
Publications:
1. Yang, J., and Abdel-Malek, K., Human Reach Envelope and
Zone Differentiation for Ergonomic Design, Human Factors and Ergonomics
in Manufacturing, Vol. 19, Issue 1, 15-34, 2009. DOI
2.
Yang, J., Verma, U., Marler, T., Beck, S., Rahmatalla, S., and Harrison,
C., Workspace Zone Differentiation Tool for Visualization of Seated
Postural Comfort, International Journal of Industrial Ergonomics, Vol. 39, no. 1,
267-276, 2009. DOI
3.
Yang, J., Sinokrot, T., and Abdel-Malek, K., Workspace Zone
Differentiation Analysis and Visualization for Virtual Humans, Ergonomics,
Vol. 51, Issue 3, 2008, 395-413. DOI
|
Publications:
1.
Yang, J., Sinokrot, T., and Abdel-Malek, K., A
General Analytic Approach for Santos Upper Extremity Workspace, Computers
and Industrial Engineering, Vol. 54, 2008,
242-258. DOI
2. Yang, J., Abdel-Malek, K., and Nebel, K., Reach Envelope
of a 9 Degree of Freedom Model of the Upper Extremity, International
Journal of Robotics and Automation, Vol. 20, No.4, 2005, 240-259. DOI
3.
Yang, J., Abdel-Malek, K., and Nebel, K., Restrained and
Unrestrained Driver Reach Barriers, SAE Transactions: Journal of
Aerospace, Vol. 113, 1, 2004, 288-296. DOI
|
|
|
|
Hand Modeling
|
Piano Project: Transdisciplinary
Research of Academy at Texas Tech University
|
|
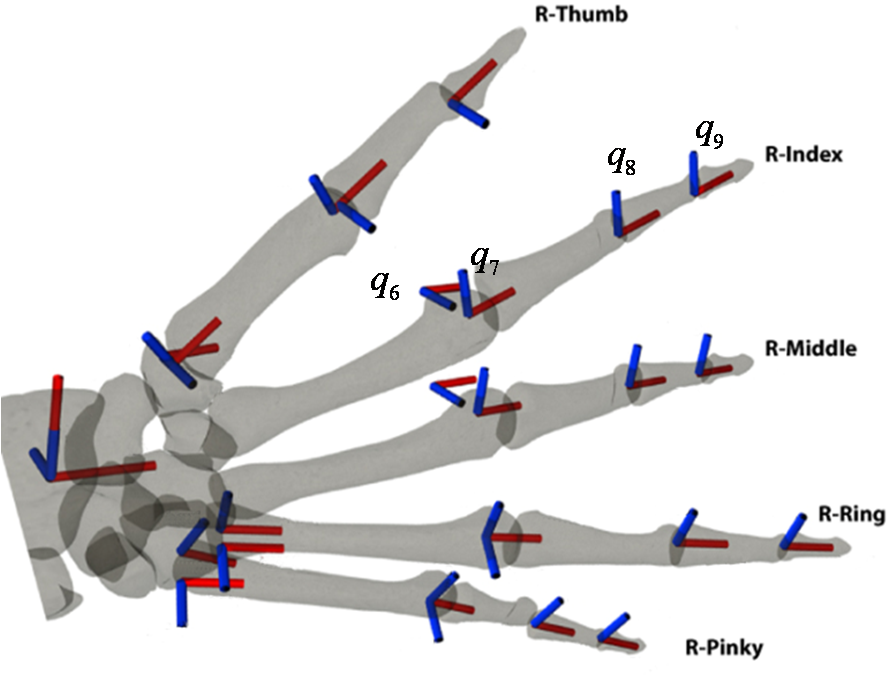   
Publications:
1. Pena-Pitarch,
E., Falguera, N.T., and Yang, J., Virtual
Human Hand: Model and Kinematics, Computer
Methods in Biomechanics and Biomedical Engineering, 17(5), 568-579,
2014. DOI
2. Yang, J., Pena Pitarch, E., Kim, J., and Abdel-Malek, K.,
Posture Prediction and Force/Torque Analysis for Human Hands, Proceedings
of SAE Digital Human Modeling for Design and Engineering, July
4-6, 2006, Lyon, France.
|
 
Motion Capture
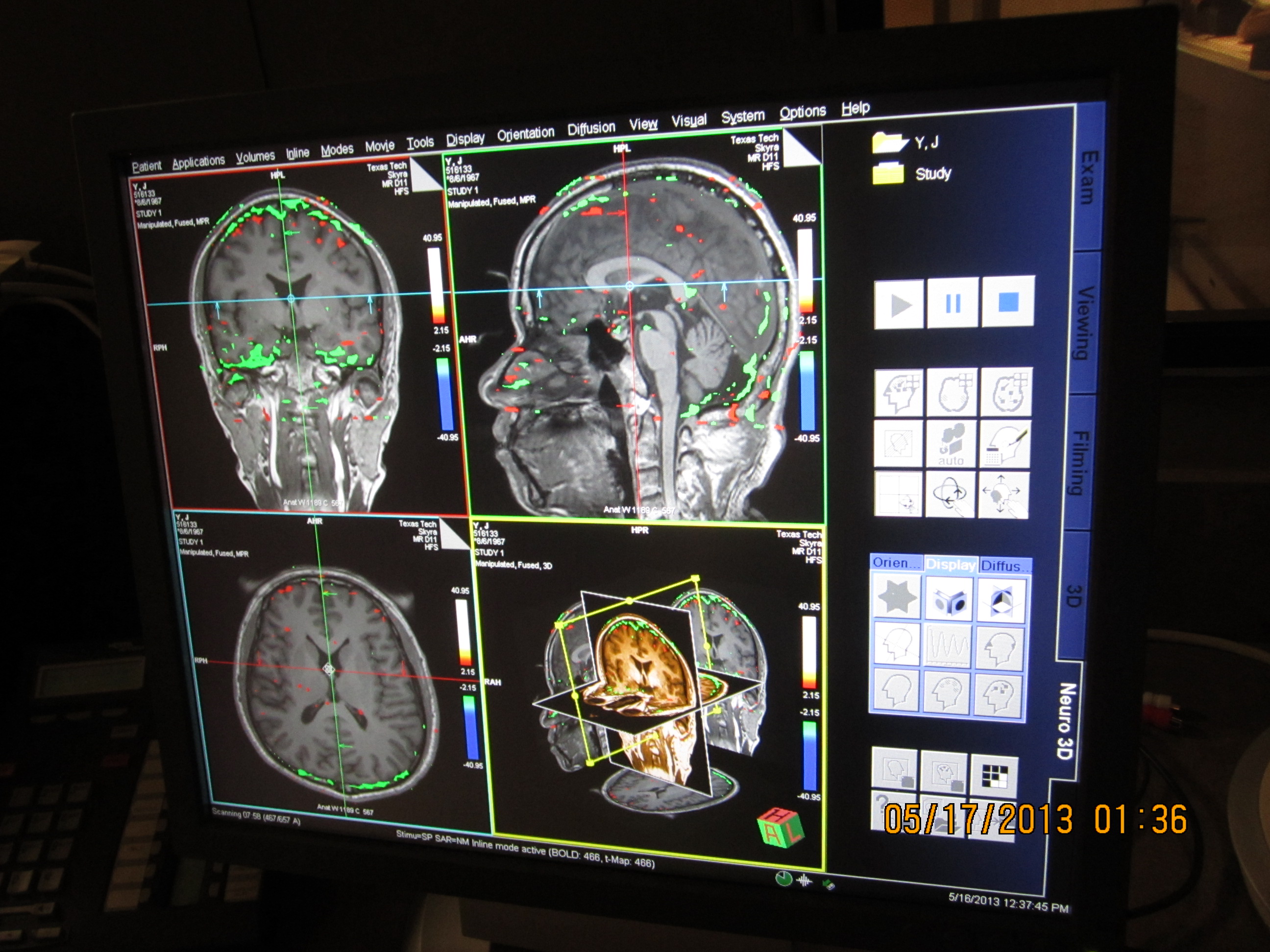 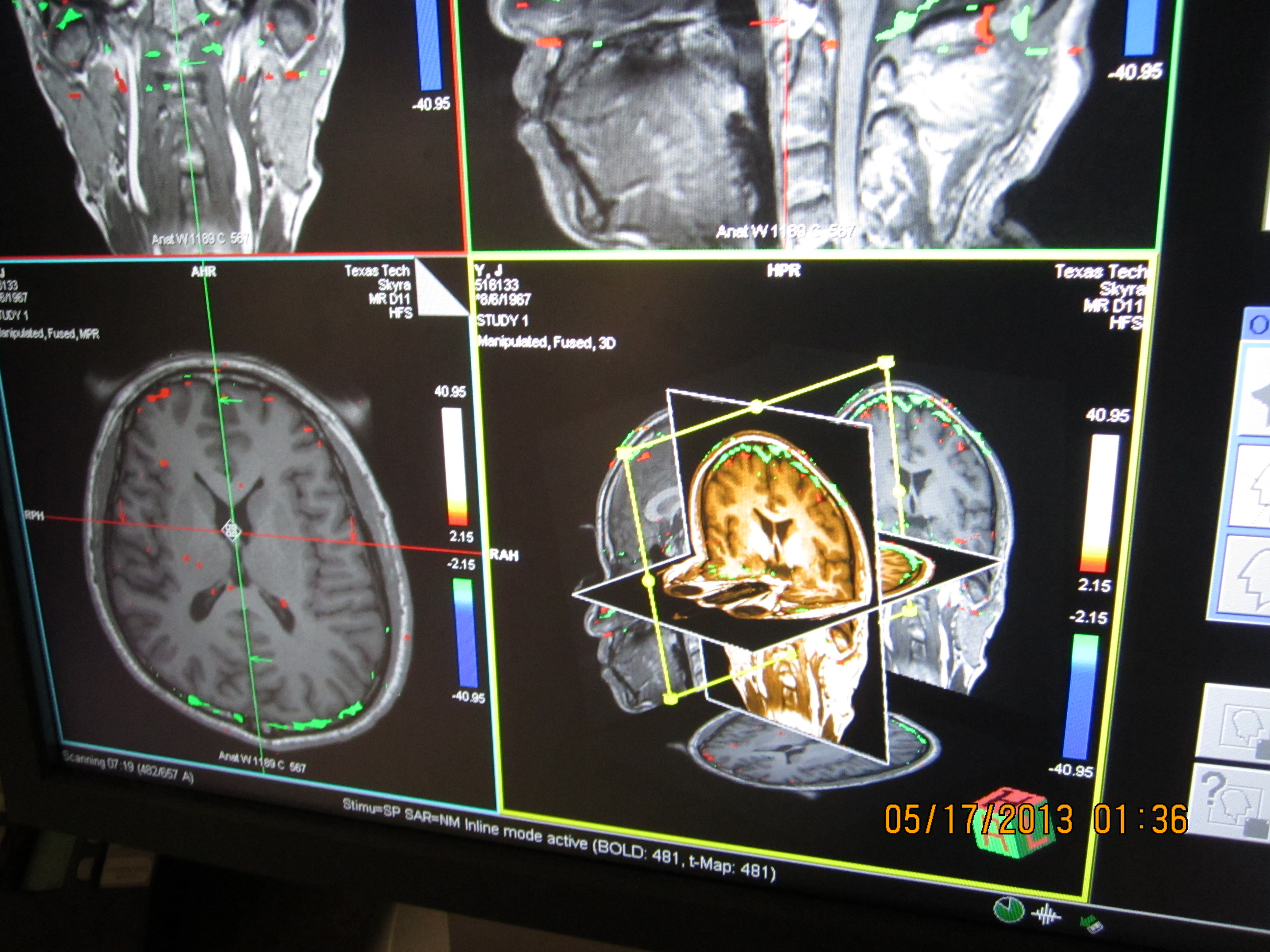
Neuroscience study of piano play performance
through fMRI
Publications:
1.
Hou, J., Rajmohan, R.,
Fang, D., Al-Khalil, K., Yang, J., Westney, W., Grund, C.,
and O'Boyle, M., Mirror Neuron Activation of Musicians and Non-musicians in
Response to Motion Captured Piano Performances, Brain and Cognition, Vol. 115, 2017, 47-55. DOI
2.
Westney, W., Grund, C.M., Yang, J., Cloutier, A., Latimer, J., O’Boyle, M., Fang,
D., and Hou, J., The Pedagogical Value of “Enjoyment” in the Classical
Piano Studio, Music Teachers National
Association (MTNA) e-Journal,
Volume 7, Issue 4, 2016, 2-21. DOI
3.
Westney, W., Grund, C., Latimer, J., Cloutier, A., Yang, J., and O’Boyle, Hou,
J., and Fang, D., Musical
Embodiment and Perception: Performances, Avatars and Audiences, Special
Issue: Music and Meaning, Signata-Annals of Semiotics, No. 6, 2015,
353-381. DOI
|
|
|
|
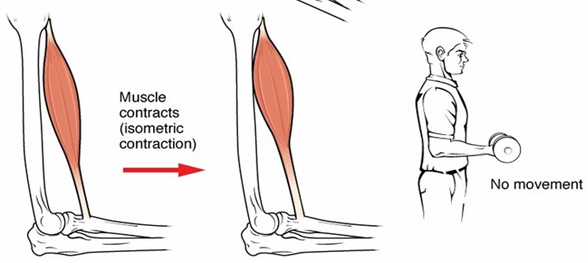
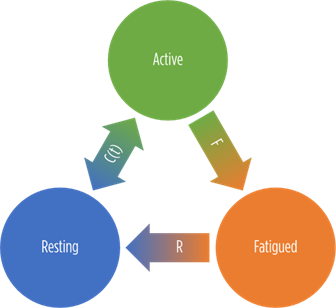
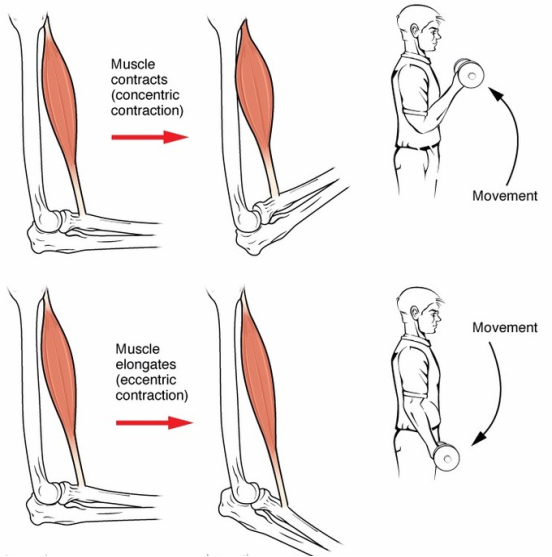
Muscle Fatigue
Modeling
|
|
Muscle Fatigue
Model for Static Tasks (Isometric Contraction)
|
Joint-Based
Fatigue Model for Dynamic Tasks
|
|
|
|
|
|
|
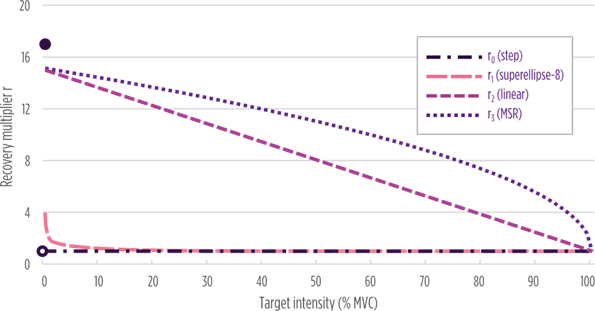
Publications:
1. Rikshit, R., Barman, S, Xiang, Y., and Yang,
J., Sensitivity
Analysis of Sex- and Functional Muscle Group-Specific Parameters for a
Three-Compartment-Controller Model of Muscle Fatigue, Journal of Biomechanics, 141, 111224, 2022. DOI
2. Rakshit, R., Xiang,
Y., and Yang, J., Functional Muscle Group- and Sex-Specific
Parameters for a Three-Compartment Controller Muscle Fatigue Model Applied
to Isometric Contractions, Journal of Biomechanics, 127, 110695, 2021. DOI
3. Rakshit, R., and Yang, J., Modelling Muscle Recovery from a Fatigued State in
Isometric Contractions for the Ankle Joint, Journal of Biomechanics, Vol. 100, February 13, 2020, 109601.
DOI Errata DOI
|
|
|
|
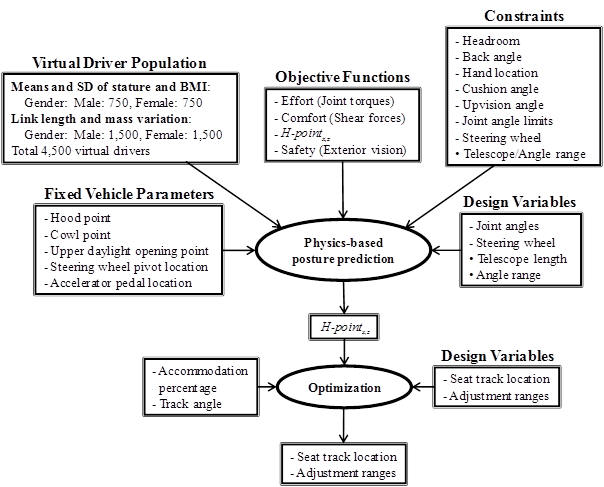
Driver
accommodation
|
|

|
|
|
Publications:
1.
Ozsoy, B., Ji, X., Yang,
J., Gragg, J., and Howard, B., Simulated Effect of Driver and
Vehicle Interaction on Vehicle Interior Layout, International Journal of Industrial Ergonomics, Vol. 48, 2015,
11-20. DOI
2.
Gragg, J., Yang, J., and Howard, B., Hybrid Method for Driver Accommodation Using
Optimization-Based Digital Human Models, Computer Aided Design, Vol.
44, Issue 1, 2012, 29-39. DOI
3.
Gragg, J., Yang, J., and Long, J., Optimization-Based Approach for Determining the
Driver Seat Adjustment Range for Vehicles, International Journal of Vehicle Design, Vol. 57, Nos. 2/3, 2011, 148-161. DOI
4. Gragg,
J., and Yang, J.,
Effect
of Obesity on Seated Posture Inside a Vehicle Based on Digital Human
Models, SAE International Journal of
Material and Manufacturing, Vol. 4, No. 1, 516-526, 2011. DOI
|
|
|
|
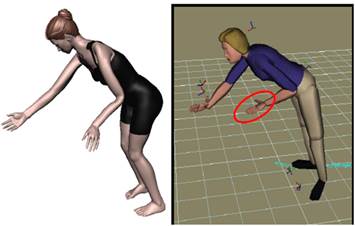
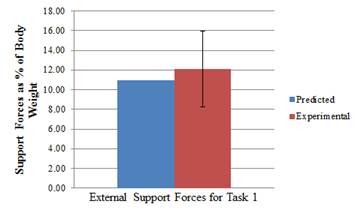
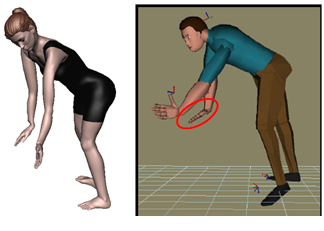
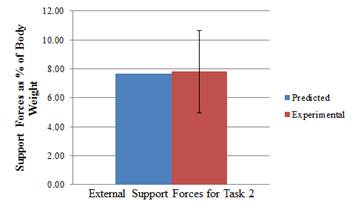
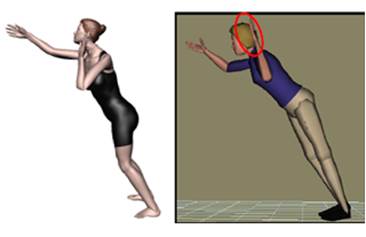
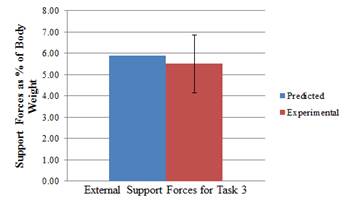
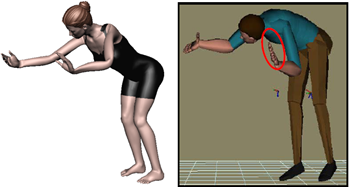
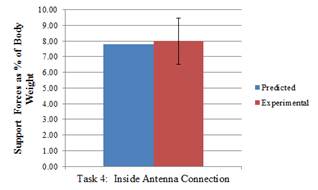
Optimal Posture and Supporting Hand Force Prediction for
Automotive Assembly One-Hand Tasks
|
|
|
|
|
|
|
|
|
|
|
Publications:
1. Howard, B., Yang, J., and Ozsoy, B.,
Optimal Posture and Supporting Hand Force Prediction for Common Automobile
Assembly One-Hand Tasks, ASME Journal of Mechanisms and Robotics, Vol. 6, Issue 2,
021009 (Mar 12, 2014).
DOI
|
|
|
|
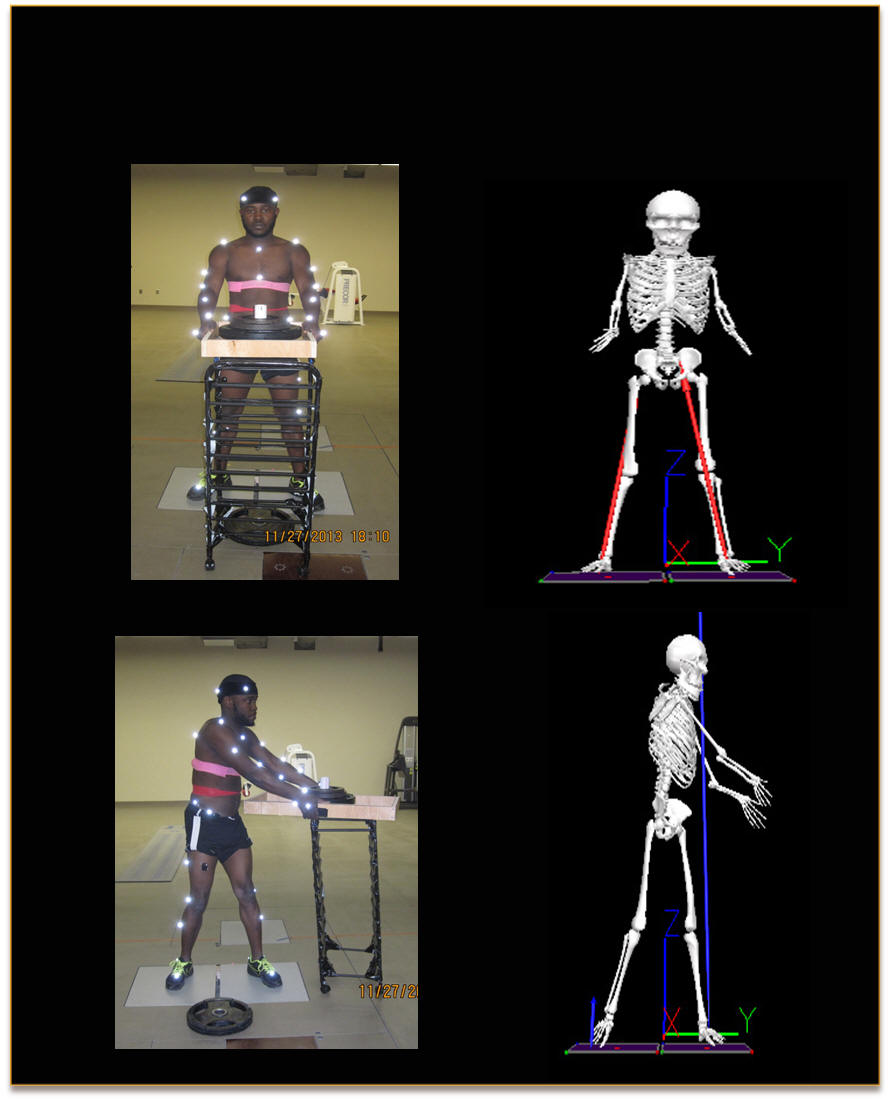
Injury Risks in Box Lifting
|
Micro Physical Environment Factors for Patient Falls
|
|
Publications:
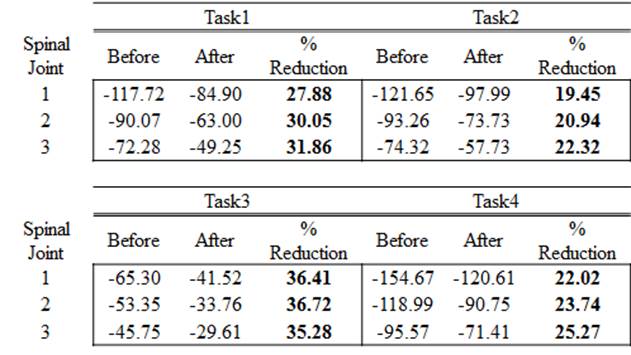
1. Haddas, R.,
Samocha, Y., and Yang, J.,
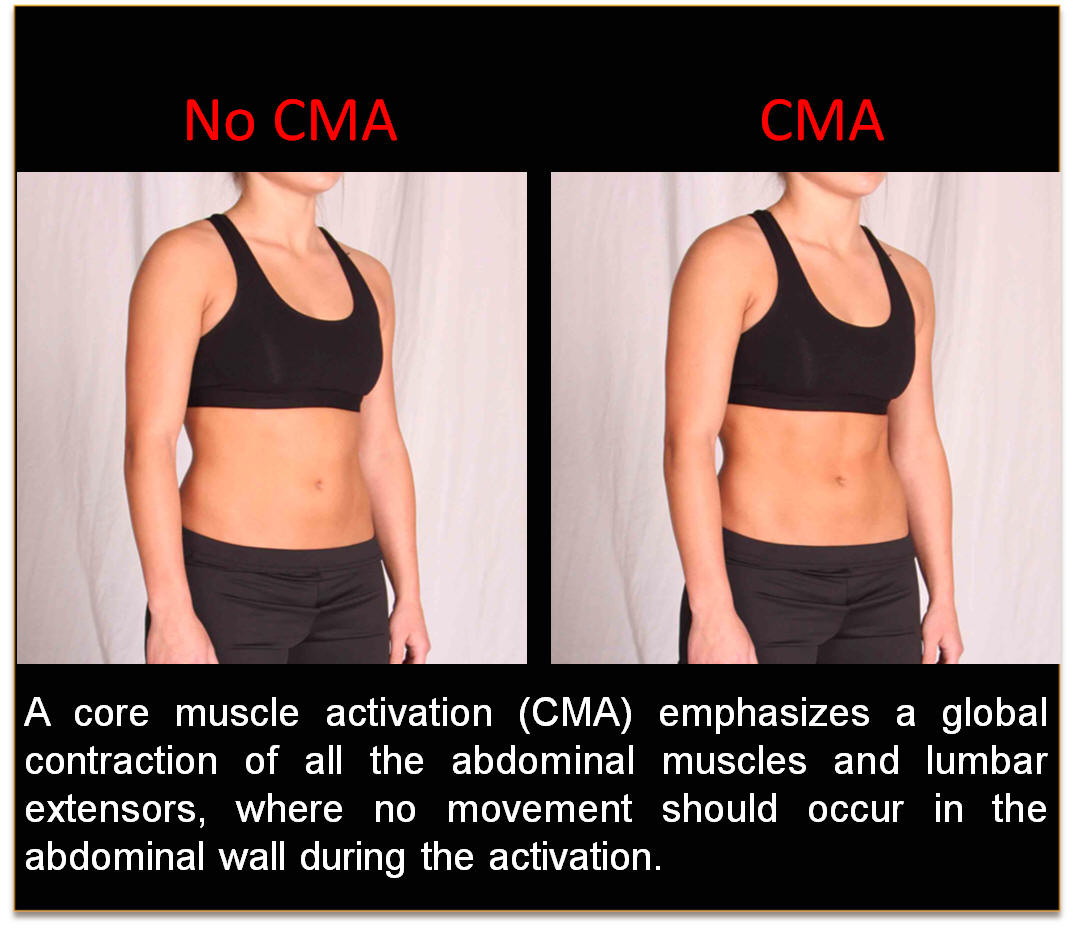
Effects of Volitional Spine Stabilization on Trunk Control during
Asymmetric Lifting Task in Patients with Recurrent Low Back Pain, Global Spine Journal, Vol. 10(8), 1006-1014, 2020. DOI
2. Haddas, R., Yang, J., and Lieberman,
I.H., Effects of Volitional Spine Stabilization on Lifting Task in
Recurrent Low Back Pain Population, European
Spine Journal, Volume 25, Issue 9, 2016, 2833-2841. DOI
|
 
Publications:
1. Pati, D., Valipoor,
S., Cloutier, A., Yang, J.,
Freier, P., Harvey, T.E., and Lee, J., Physical Design Factors Contributing
to Patient Falls, (in press) Journal
of Patient Safety. DOI
2. Cloutier, A., Yang, J., Pati, D., and
Valipoor, S., Experimental Identification of Potential Falls in Older Adult
Hospital Patients, Journal of
Biomechanics, Vol. 49, Issue 7, 2016, 1016-1020. DOI
|
|
|
|
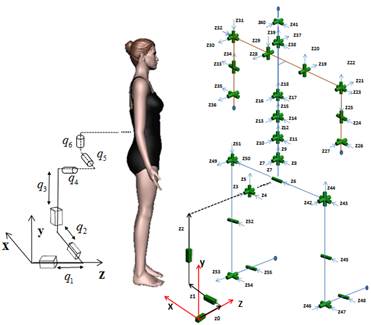
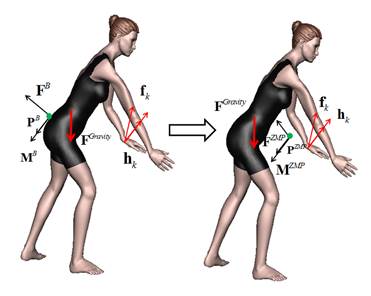
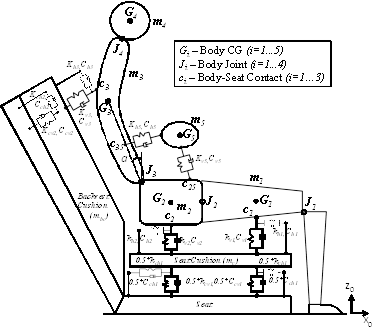
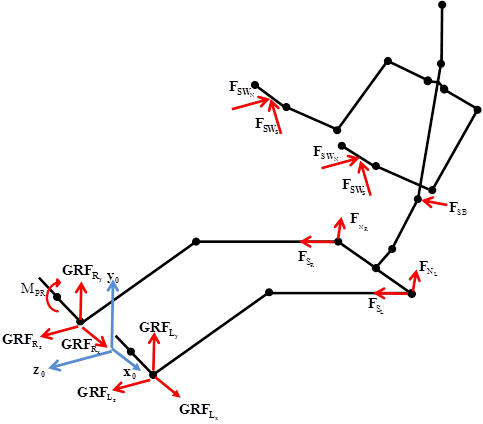
Multibody Biodynamic Model
|
|

|
|
|
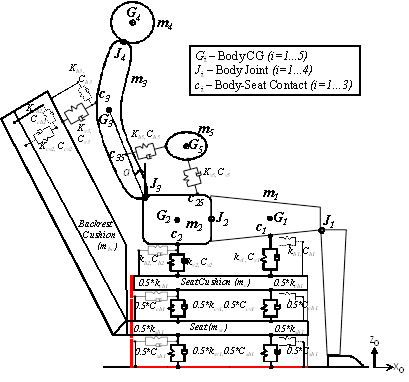
Publications:
1. Yang, Y., Zhao, Q.,
and Yang, J., Biodynamic Model for Seated Posture under Vibration Considering any
Two-Direction Coupling among the Vertical, Longitudinal, and Lateral
Directions, (under review) DOI
2. Yu, Z., Zhao, Q., Yang,
J., Xia, Y., and Ma, Y., Uncoupled Spatial Biodynamic Model for Seated Humans Exposed to Vibration-Development
and Validation, International Journal of Industrial Ergonomics,
85 (2021) 103171. DOI
3. Zhang, W., Ma, Z.,
Jin, A., Yang, J., and
Zhang, Y., An Improved Biodynamic Model Considering Foot and Floor
Interaction, SAE World Congress,
Detroit, Michigan, USA, April 21-23, 2015. DOI
4. Kumbhar, P., Li,
N., Xu, P., and Yang, J.,
Minimizing Occupant Body Fatigue to Determine Seat Dynamic Parameters, SAE
Paper 2014-01-0877, SAE World Congress, April 8-10, 2014, Detroit, MI. DOI
5. Kumbhar, P., Xu,
P., and Yang, J.,
Evaluation of Human Body Response to Different Vehicle Seats Using a
Multibody Biodynamic Model, SAE World
Congress, April 16-18, 2013, Detroit, MI. DOI
|
|
|
|
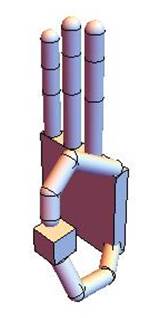
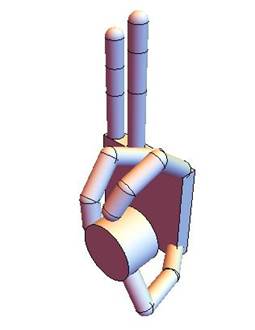
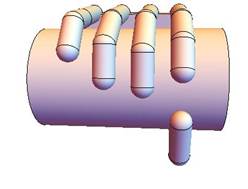
Grasping Force Optimization for Common Anthropomorphic Grasps
|
|
 
|
|
|
|
Tip
|
Tripod
|
Cylinder
|
|
|
Average
|
SD
|
Average
|
SD
|
Average
|
SD
|
|
Nonlinear
Hard
|
0.026
|
0.040
|
0.030
|
0.045
|
1.66
|
1.18
|
|
Nonlinear
Soft
|
0.029
|
0.020
|
0.055
|
0.022
|
3.08
|
1.94
|
|
LMI
Hard
|
0.029
|
0.040
|
0.060
|
0.044
|
4.63
|
2.20
|
|
LMI
Soft
|
0.036
|
0.020
|
0.12
|
0.17
|
10.7
|
3.30
|
|
Linear
4 Segments
|
0.0091
|
0.020
|
0.012
|
0.025
|
0.23
|
0.055
|
|
Linear
10 Segments
|
0.011
|
0.024
|
0.018
|
0.036
|
0.72
|
0.23
|
|
Linear
20 Segments
|
0.016
|
0.024
|
0.022
|
0.090
|
3.52
|
1.31
|
Average
Computation Time (s)
|
|
|
Publications:
1. Cloutier, A., and Yang, J., Examining the
Robustness of Grasping Force Optimization Methods Using Uncertainty
Analysis, ASCE-ASME Journal of Risk
and Uncertainty in Engineering Systems Part B: Mechanical Engineering,
Vol. 4, December 2018, 041007 (8 pages). DOI
2. Cloutier, A., and Yang, J., Grasping Force
Optimization Approaches for Anthropomorphic Hands, ASME Journal of Mechanisms and Robotics, 10 (1), 011004 (Dec.
20, 2017) (10 Pages). DOI
3. Cloutier, A., and Yang, J., Design, Control, and Sensory
Feedback of Externally-Powered Hand Prosthesis: A Literature Review, Critical Review in Biomedical
Engineering, Vol. 41, Issue 2, 2013, 161-181. DOI
|
|
|
|
|
|
·
Bioengineering, Biomechanics, Bio-Inspired Systems
The research
goal in this area is to develop computer human modules to address: (1) sports
biomechanics; (2) ACL biomechanics; (3) biomechanical discomfort model; (4)
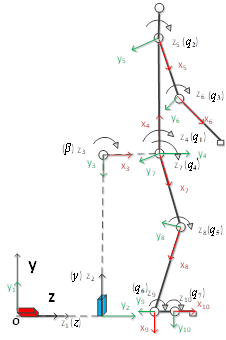
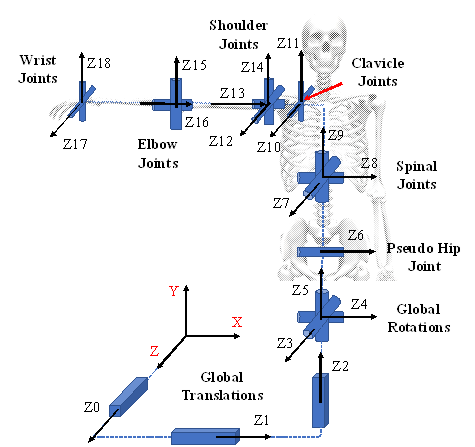
multibody human dynamics
|
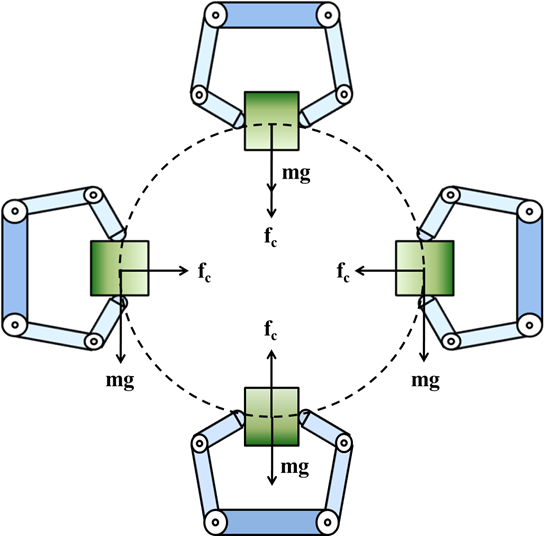
Seating Balance Prediction
|
Motion Prediction: Gait
|
|
Publications:
1.
Yang, J.,
and Kim, J., Static Joint Torque Determination of a Human Model for
Standing and Seating Tasks Considering Balance, ASME Journal of
Mechanisms and Robotics, Vol. 2, Issue 3, 2010, 031005-1-9. DOI
2. Kim, J., Yang, J.,
and Abdel-Malek, K., Multi-Objective Optimization Approach for Predicting
Seated Posture Considering Balance, International Journal of Vehicle
Design, Vol. 51, No. 3/4, 2009, 278-291.DOI
|
 
Publications:
1. Xiang, Y., Chung, H.J., Kim, H.J., Bhatt, R.,
Marler, R.T., Rahmatalla, S., Yang, J.,
Arora, J.S., and Abdel-Malek, K., Predictive Dynamics: An
Optimization-Based Novel Approach for Human Motion Simulation, Structural
and Multidisciplinary Optimization, Vol. 41, Number 3, 465-479, 2010. DOI
2.
Abdel-Malek, K., Yang, J., Marler,
T., Beck, S., Mathai, A., Patrick, A., and Arora, J., Towards a New
Generation of Virtual Humans, International Journal of Human Factors Modelling
and Simulation, Vol. 1, No. 1, 2-39, 2006. DOI
|
|
|
|
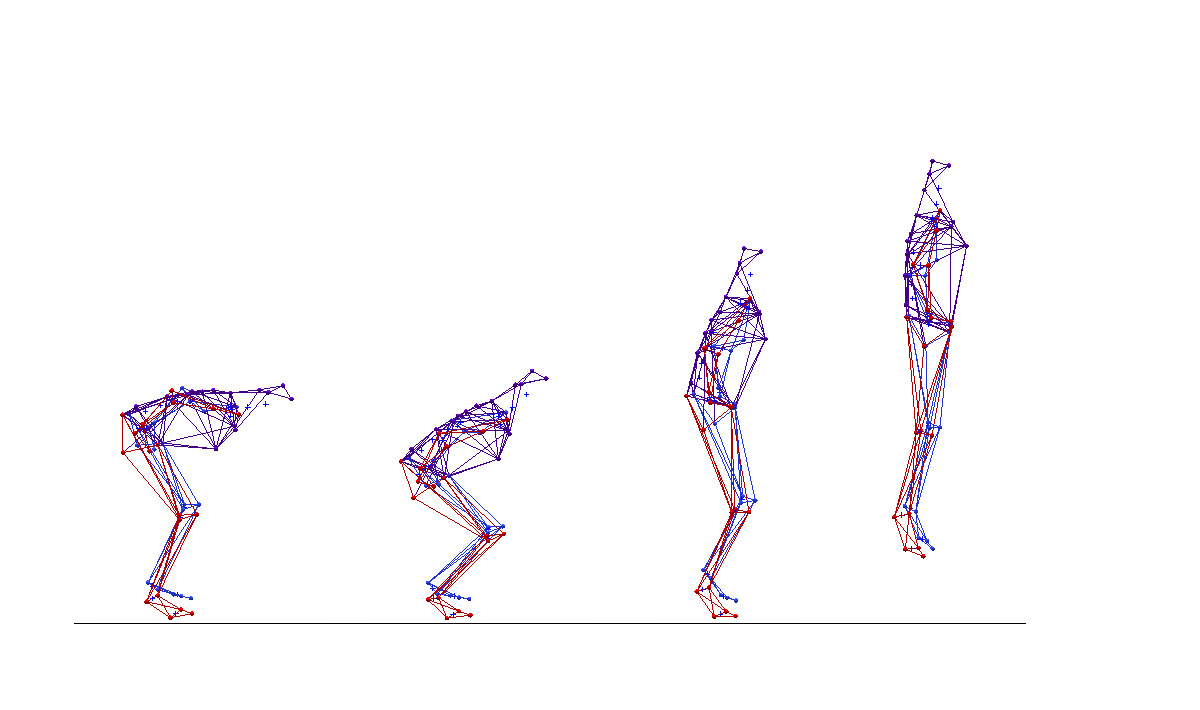
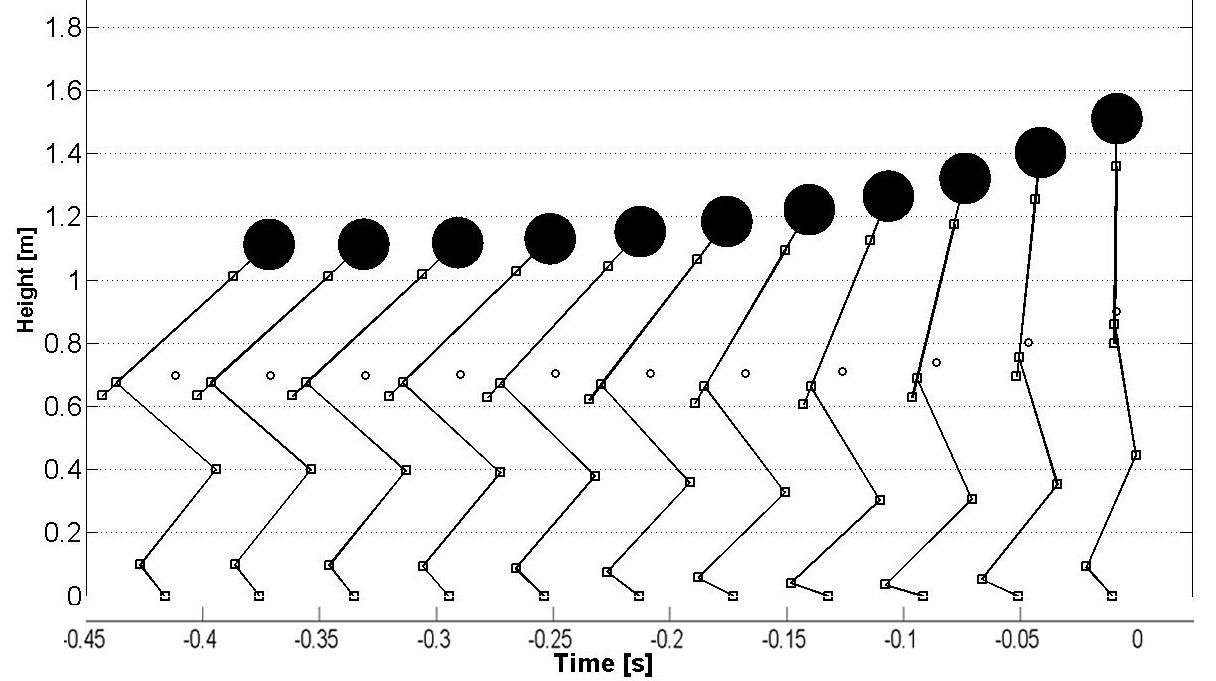
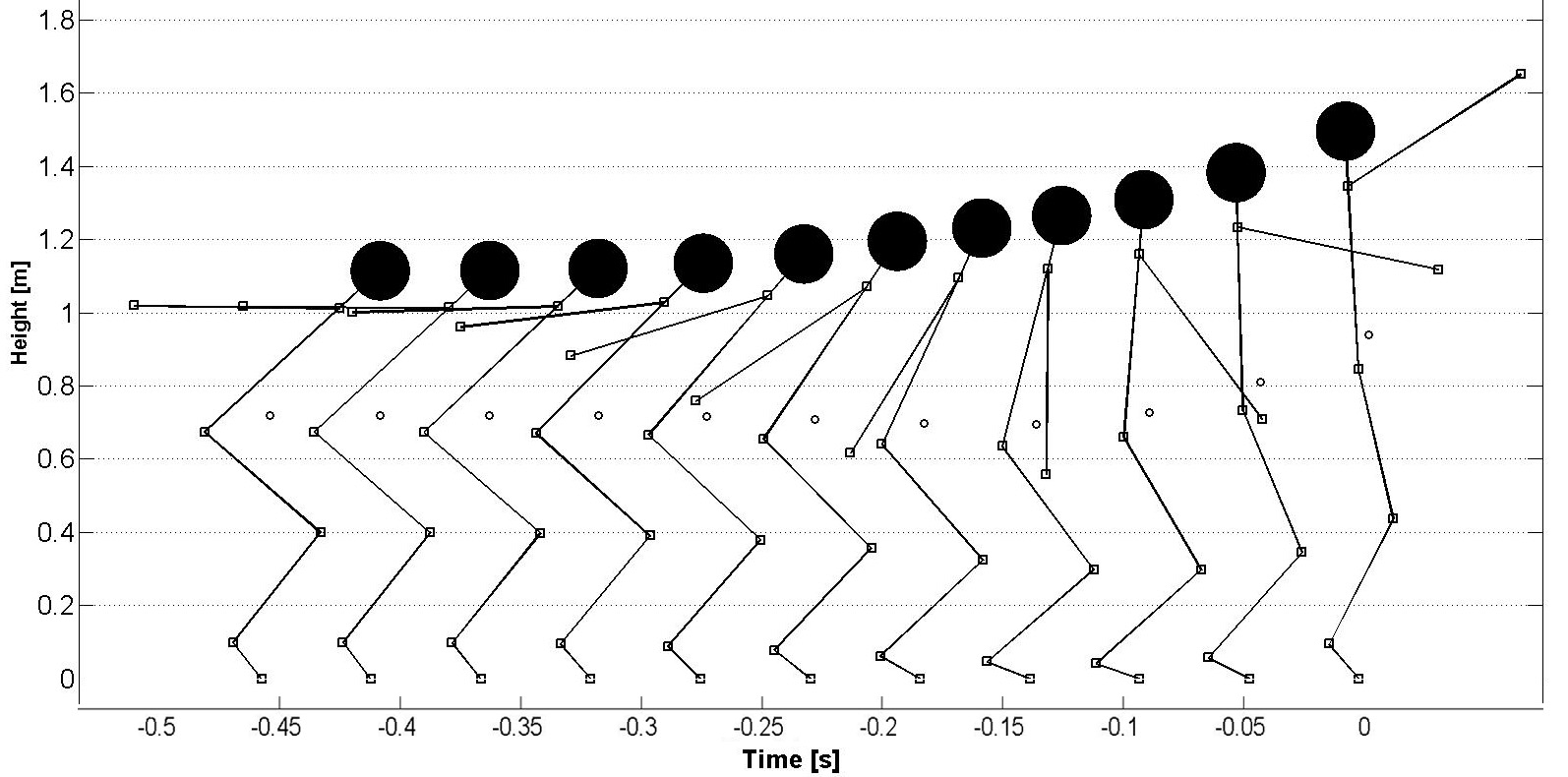
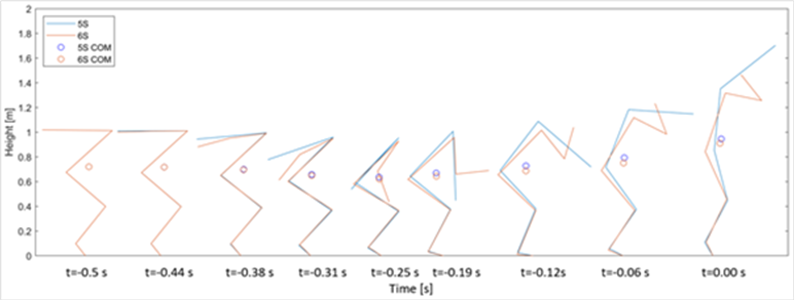
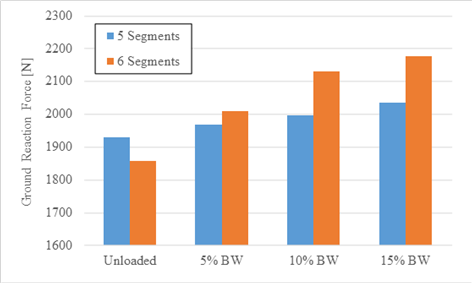
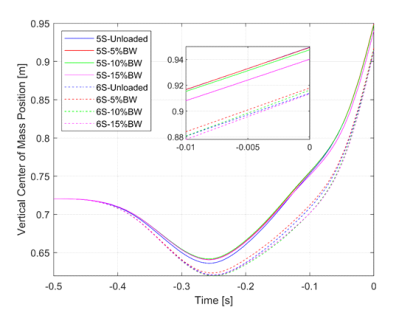
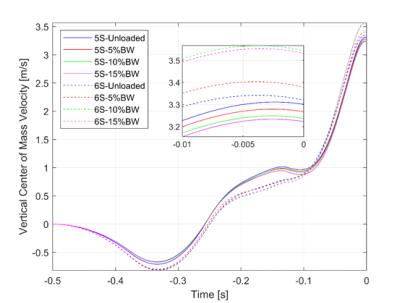
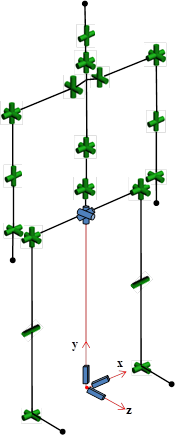
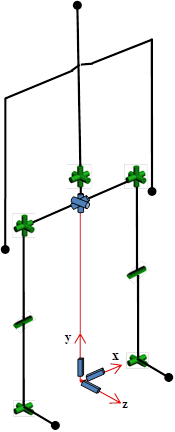
Jumping without
arm swing
|
Jumping with
arm swing
|
|
|
|
|
|
|
Publications:
1. Baus, J., Harry,
J., and Yang, J., Optimization
Based Subject-Specific Planar Human Vertical Jumping Prediction-
Effect of Elbow Flexion and Weighted Vest, IMechE, Part H: Journal of Engineering in Medicine. DOI
2. Baus, J., Harry,
J., and Yang, J., Optimization-Based
Subject-Specific Planar Human Vertical Jumping Prediction: Model
Development and Validation, IMechE, Part H: Journal of Engineering in Medicine, 235(7), 805-818, 2021. DOI
3.
Baus, J., Harry, J., and Yang, J.,
Jump and Landing Biomechanical
Variables and Methods – A Literature Review, Critical Review in
Biomedical Engineering, 48(4): 211-222, 2020. DOI
4.
Ozsoy, B., Yang, J.,
Howard, B., Domire, Z., and Boros, R., Direct Optimization-Based Planar
Human Vertical Jumping Simulation, International
Journal of Human Factors Modeling and Simulation, Vol. 2, No. 1/2, 2011, 46-66. DOI
|
|
|
|
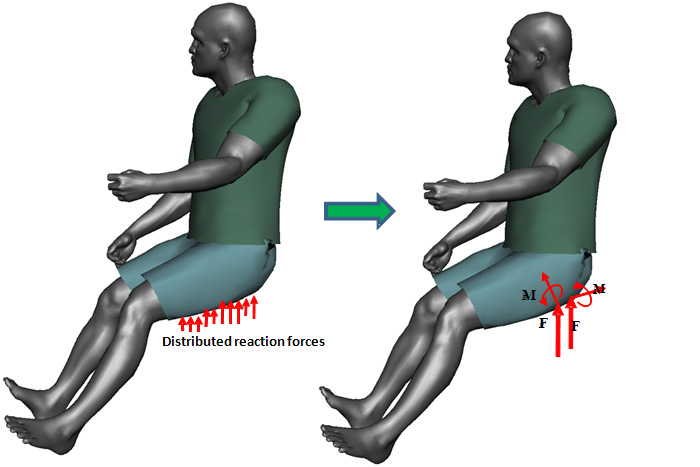
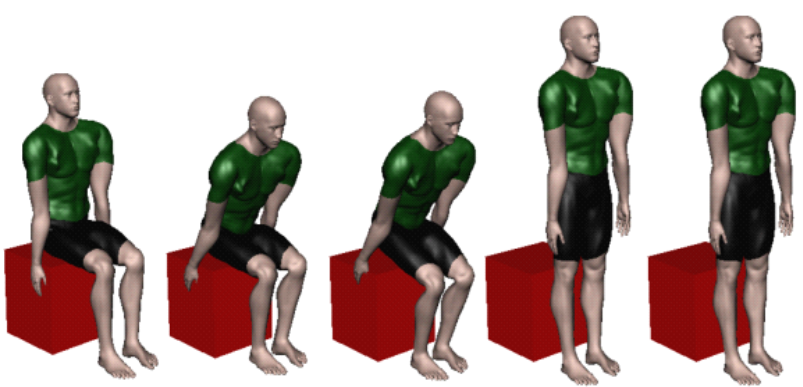
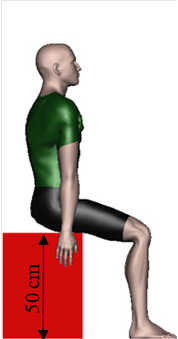
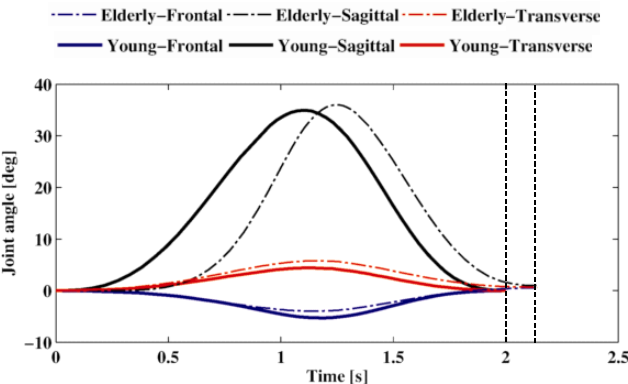
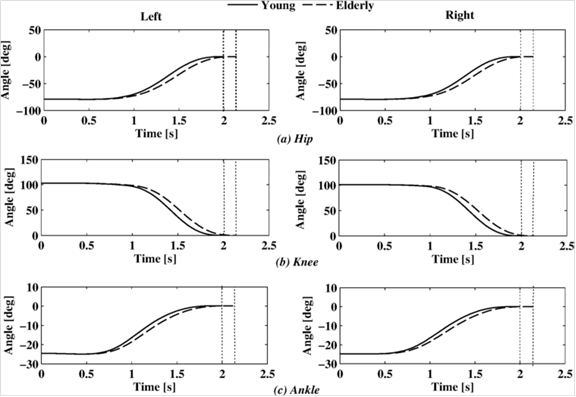
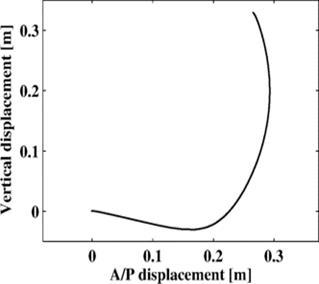
Sit-to-Stand Motion Prediction
|
|
|
|
|
|
|
|
|
|
Publications:
1. Ozsoy, B., and Yang, J., Assisted Spatial
Sit-to-Stand Prediction-Part 2: Virtual Injured Elderly Individuals, ASME Journal of Computing and
Information Science in Engineering, Dec. 2021, 21(6): 061009 (13 pages). DOI
2. Yang, J., and Ozsoy, B.,
Assisted Spatial Sit-to-Stand Prediction-Part 1: Virtual Healthy Elderly
Individuals, ASME Journal of
Computing and Information Science in Engineering, Vol. 21, 2021, 041002 (9 pages). DOI
3. Yang, J., and Ozsoy, B., Three Dimensional
Unassisted Sit-to-Stand Prediction for Virtual Healthy Young and Elderly
Individuals, Multibody System
Dynamics, 49(1), 33-52, 2020. DOI
4.
Yang, J., and Ozsoy, B., (2018) Physics-Based Sit-to-Stand Three Dimensional
Motion Prediction Considering Seat Pan Contact. In Paul G, Scataglini
S. (eds) DHM and Posturography, Elsevier.
|
|
|
|
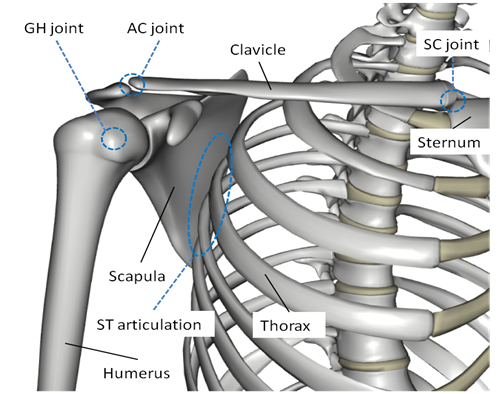
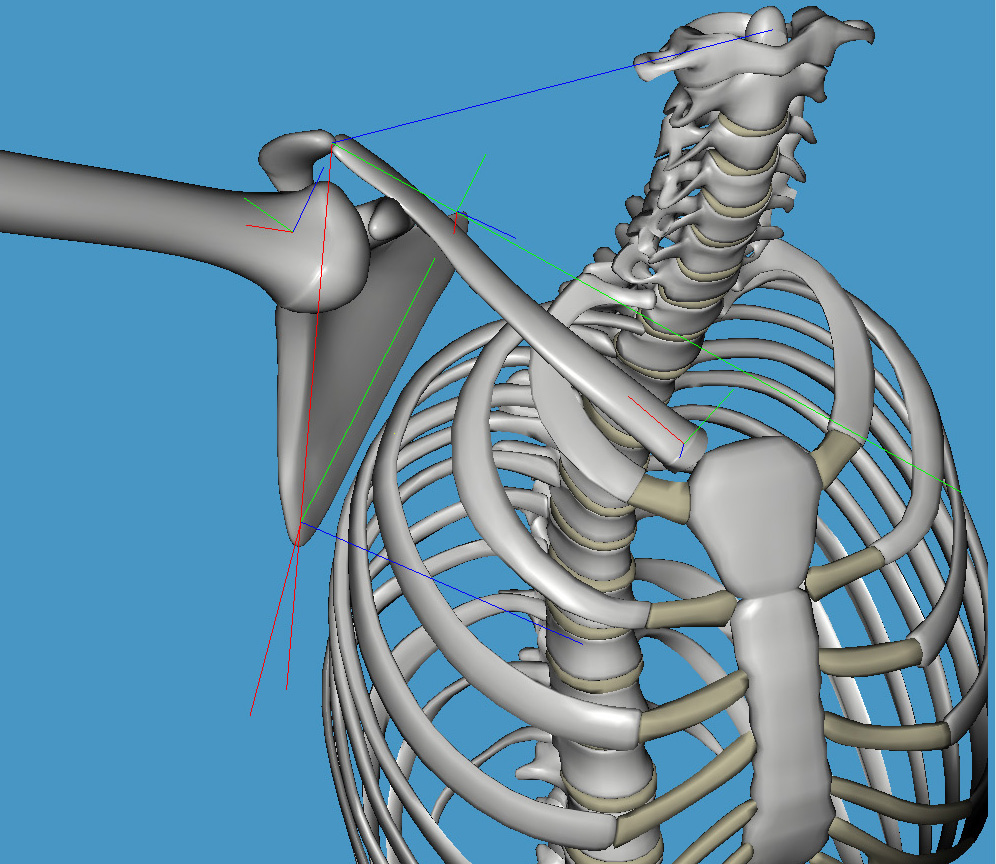
Shoulder Modeling and Experiment
|
|
Publications:
1. Yang, J., Feng, X., Xiang, Y., Kim, J., and
Rajulu, S., Determining the Three-Dimensional Relation between the Skeletal
Elements of the Human Shoulder Complex, Journal of Biomechanics, Vol. 42, No. 11, 2009, 1762-1767. DOI
2.
Yang, J., Feng, X., Xiang, Y., Kim, J., and Rajulu, S., Joint Coupling Relationship for Human Shoulder
Complex, International Conference on Human-Computer Interaction (HCI),
2nd International Conference on Digital Human Modeling, San Diego,
CA, July 19-24, 2009.
3. Yang, J., Feng, X., Kim, J., and Rajulu, S., Review
of Biomechanical Models of Human Shoulder Complex, International Journal of Human
Factors Modelling and Simulation, Vol. 1, No. 3,
2010, 271-293. DOI
|
|
|
|
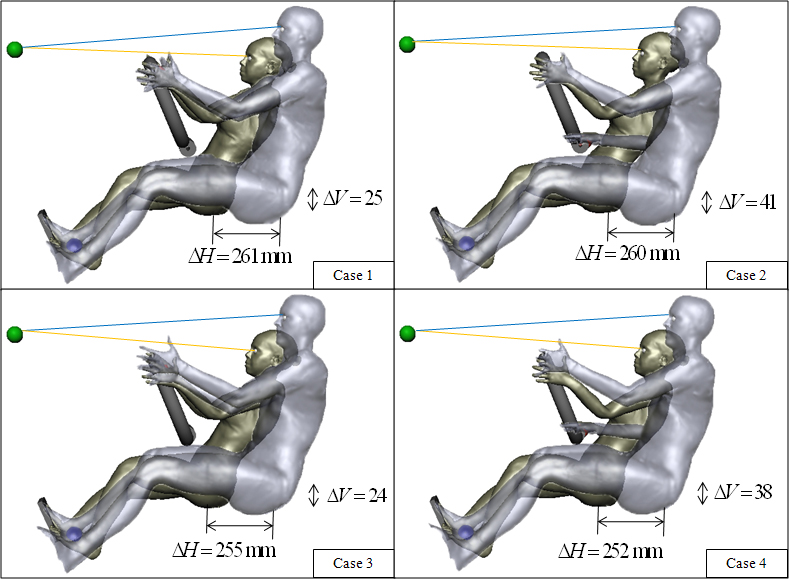
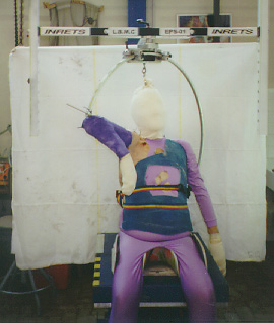
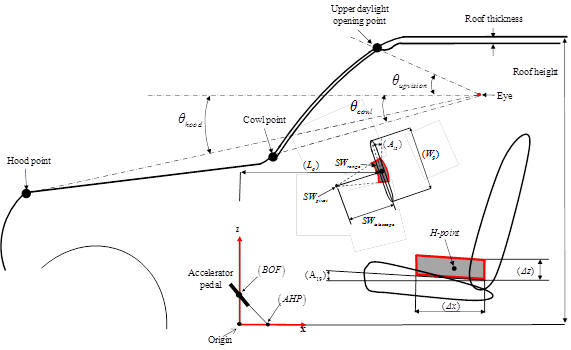
Driver and Vehicle Interaction
Study
|
|
Simulation-based method
|
Vehicle interior layout
|
|
Driver model
|
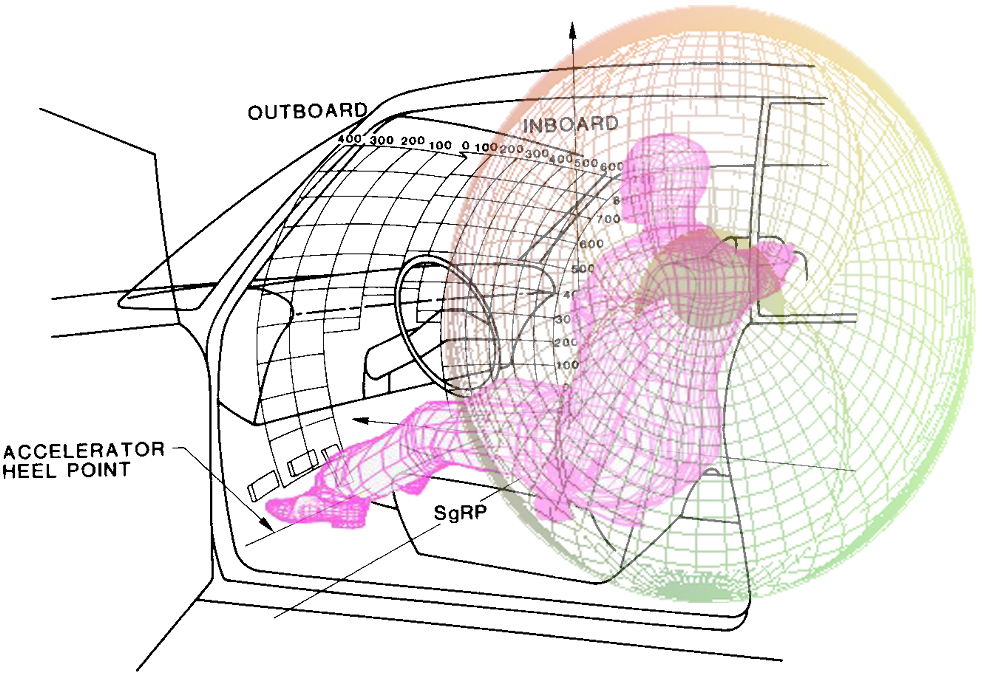
Predicted H-point,
eye, and preferred center of the steering wheel locations with the accommodation
level of 95%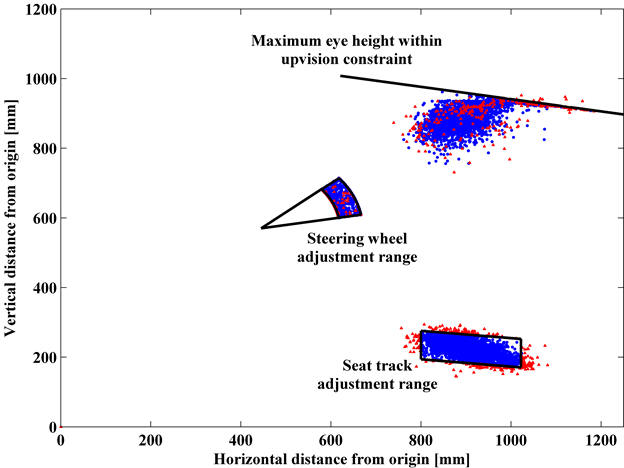
|
|
Publications:
1.
Ozsoy, B., Ji, X., Yang,
J., Gragg, J., and Howard, B., Simulated Effect of Driver and
Vehicle Interaction on Vehicle Interior Layout, International Journal of Industrial Ergonomics, Vol. 48, 2015,
11-20. DOI
|
|
|
|
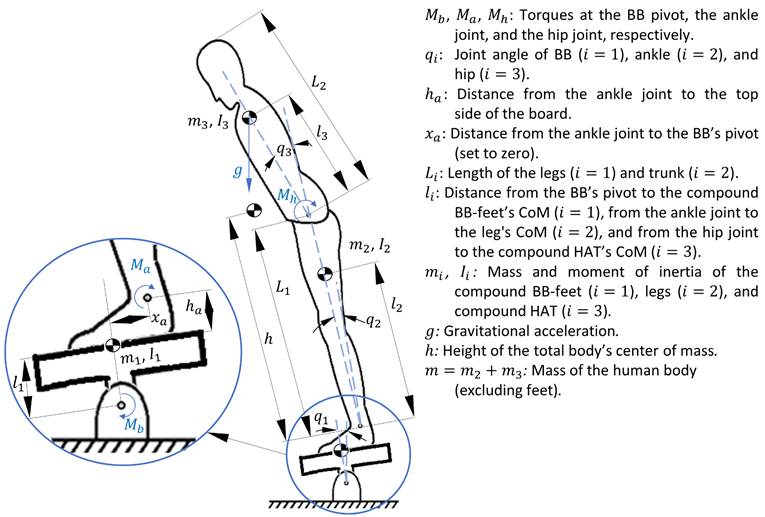
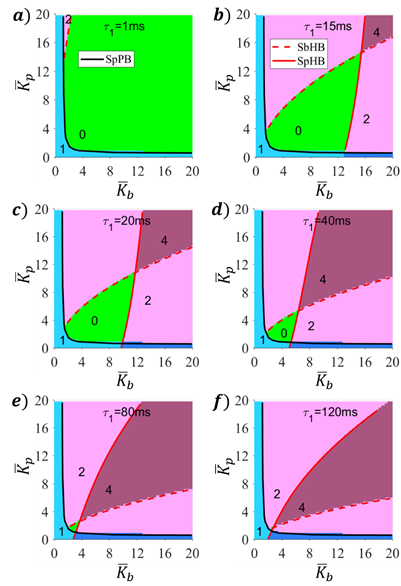
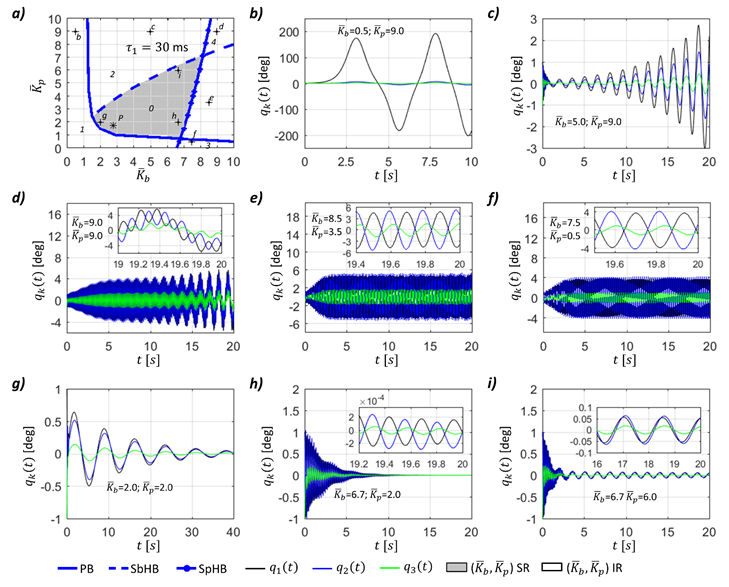
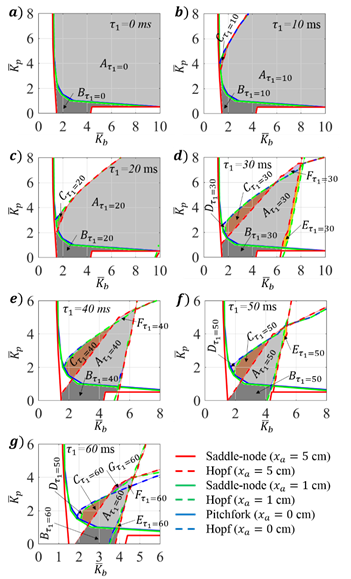
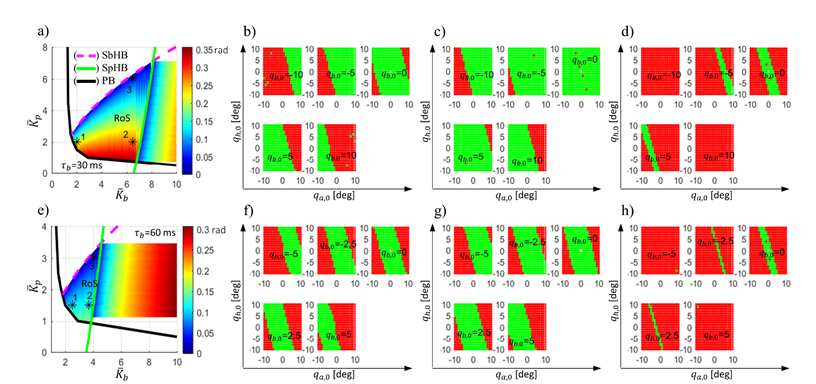
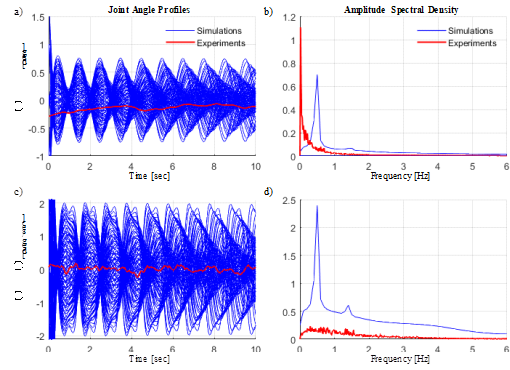
Human Upright Postural Balance
|
|
|
|
|
|
|
|
|
|
|
Publications:
1.
Chumacero, E., and Yang,
J., Validation for an Ankle-Hip Model of Human Balance on a Balance
Board Via Frequency Content, Gait and Posture, 82, 2020, 313-321. DOI
2.
Chumacero, E., and Yang,
J., Effect of Disturbances and Sensorimotor Deficits on the
Postural Robustness of an Ankle-Hip Model of Balance on a Balance Board, Nonlinear Dynamics, Vol. 99,
1959-1973, 2020. DOI
3.
Chumacero, E., Yang,
J., and Chagdes, R. J., Effect of Ankle-Pivot Misalignment and
Upward Ankle Vertical Displacement on Stability and Equilibrium Location
for an Ankle-Hip Model of Balance on a Balance Board, ASME Journal of Computational Nonlinear Dynamics, 15(2), Feb.
2020, 021002 (13 pages). DOI
4.
Chumacero, E., and Yang,
J., Basin of Attraction and Limit Cycle Oscillation Amplitude of an
Ankle-Hip Model of Balance on a Balance Board, ASME Journal of Biomechanical Engineering, Vol. 141, Number 11,
2019, 111007 (9 pages). DOI
5.
Chumacero, E., Yang,
J., and Chagdes, R. J., Numerical Nonlinear Analysis for Dynamic
Stability of an Ankle-Hip Model of Balance on a Balance Board, ASME Journal of Computational and
Nonlinear Dynamics, Vol. 14, 2019, 101008 (11 pages). DOI
6.
Chumacero, E., Yang, J., and Chagdes, J. R., Effect of Sensory-Motor
Latencies and Active Muscular Stiffness on Stability for an Ankle-Hip Model
of Balance on a Balance Board, Journal
of Biomechanics, Vol. 75, 77-88, 2018. DOI
|
|
|
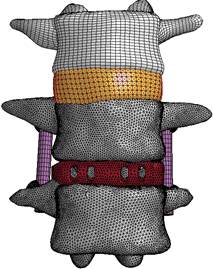
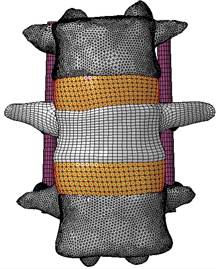
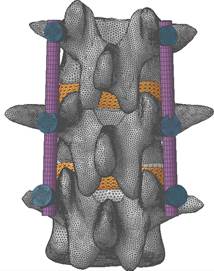
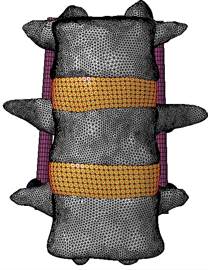
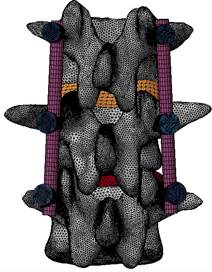
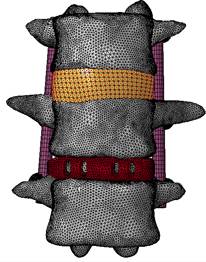
The research goal is to diagnose spine disorders and
determine the optimal surgery plan for surgeons to conduct spine surgery.
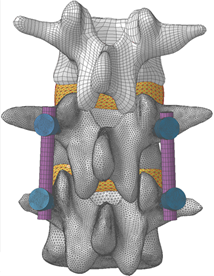
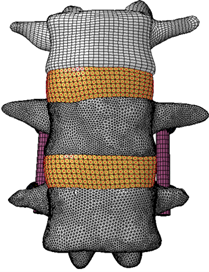
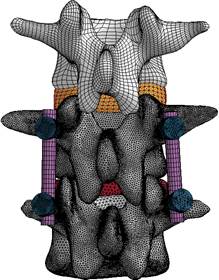
Healthy Subjects:
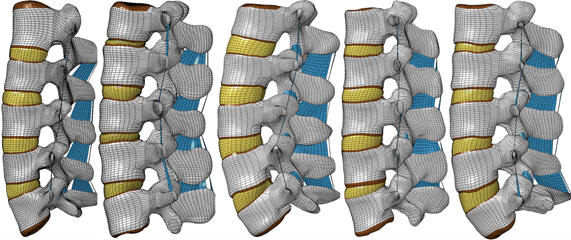
(a)
(b)
(c)
(d)
(e)
Five lumber spine FE
models of healthy subjects: (a) 22-year old male, (b) 41-year old male, (c)
47-year old male, (d) 48-year old female, (e) 49-year old female
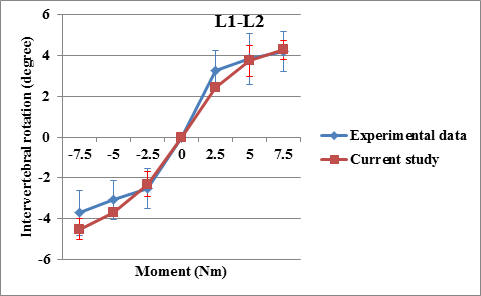 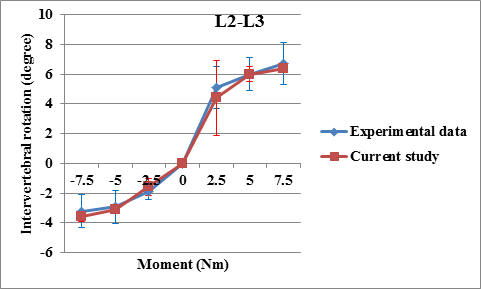
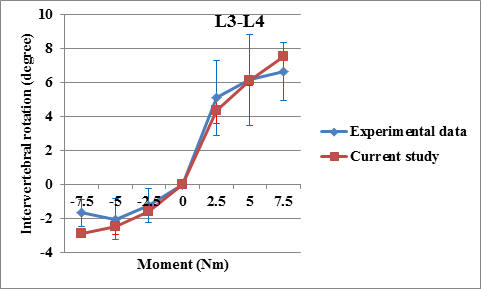 
The mean and standard deviation of IRA in four spinal levels
were obtained by the five FE models compared with experimental data (Panjabi
et al., 1994) under pure moments (2.5 Nm, 5Nm, 7.5Nm) for flexion (+) and
extension (-)
(a)
(b)
The mean and standard deviation of FJF in this study in the
L1-L2 and L3-L4 spinal levels were compared with experimental data (Sawa and
Crawford, 2008; Niosi et al, 2008; Wilson et al., 2006) with a pure moment of
7.5 Nm in axial rotation and extension directions under: (a) axial rotation
and (b) extension
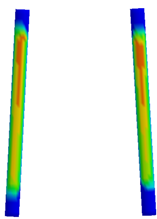
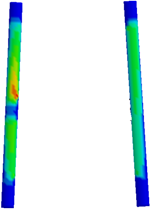
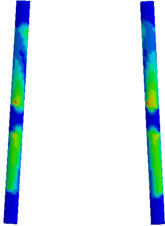
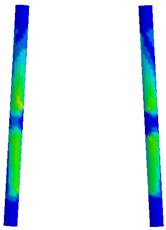
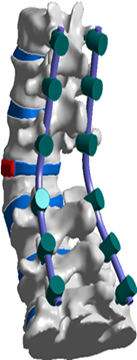
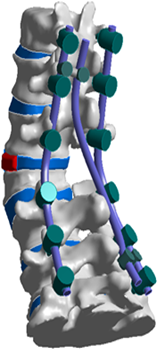
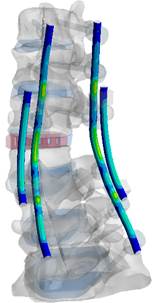
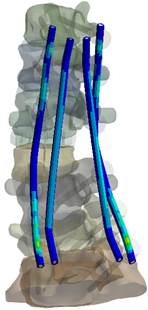
Scoliosis Subjects:
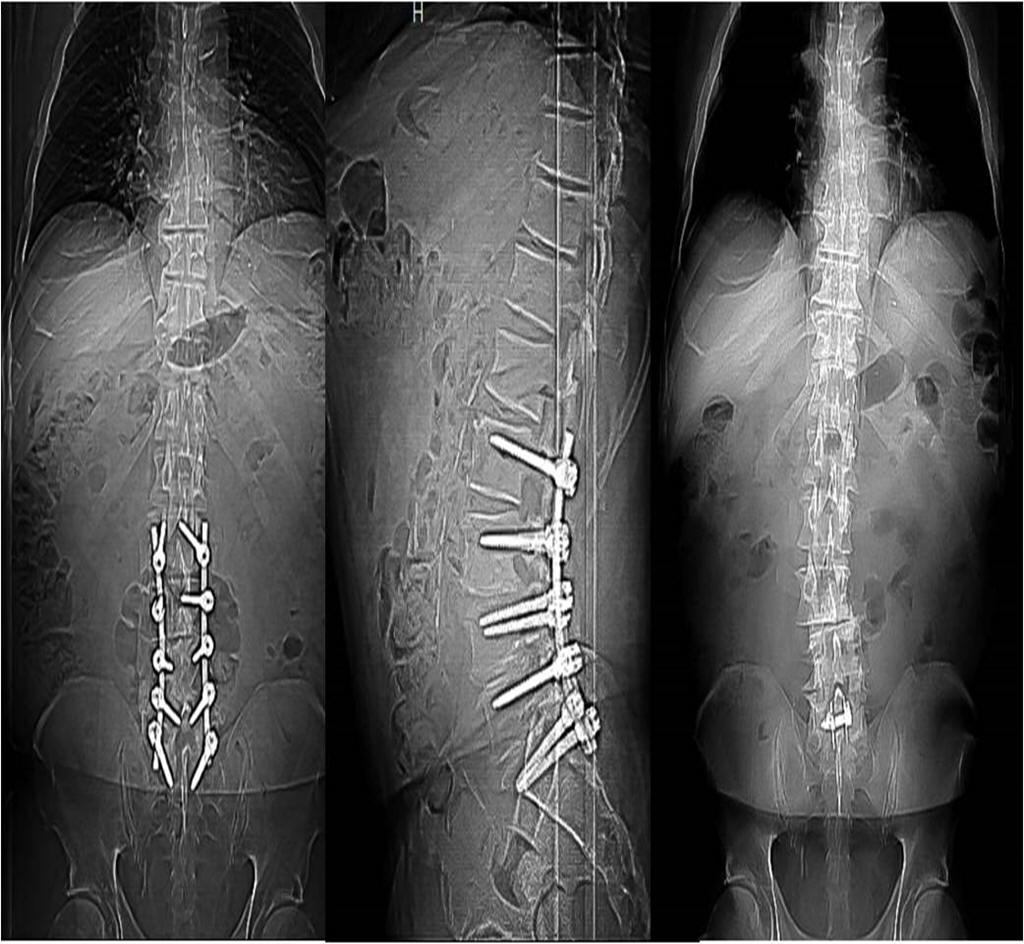 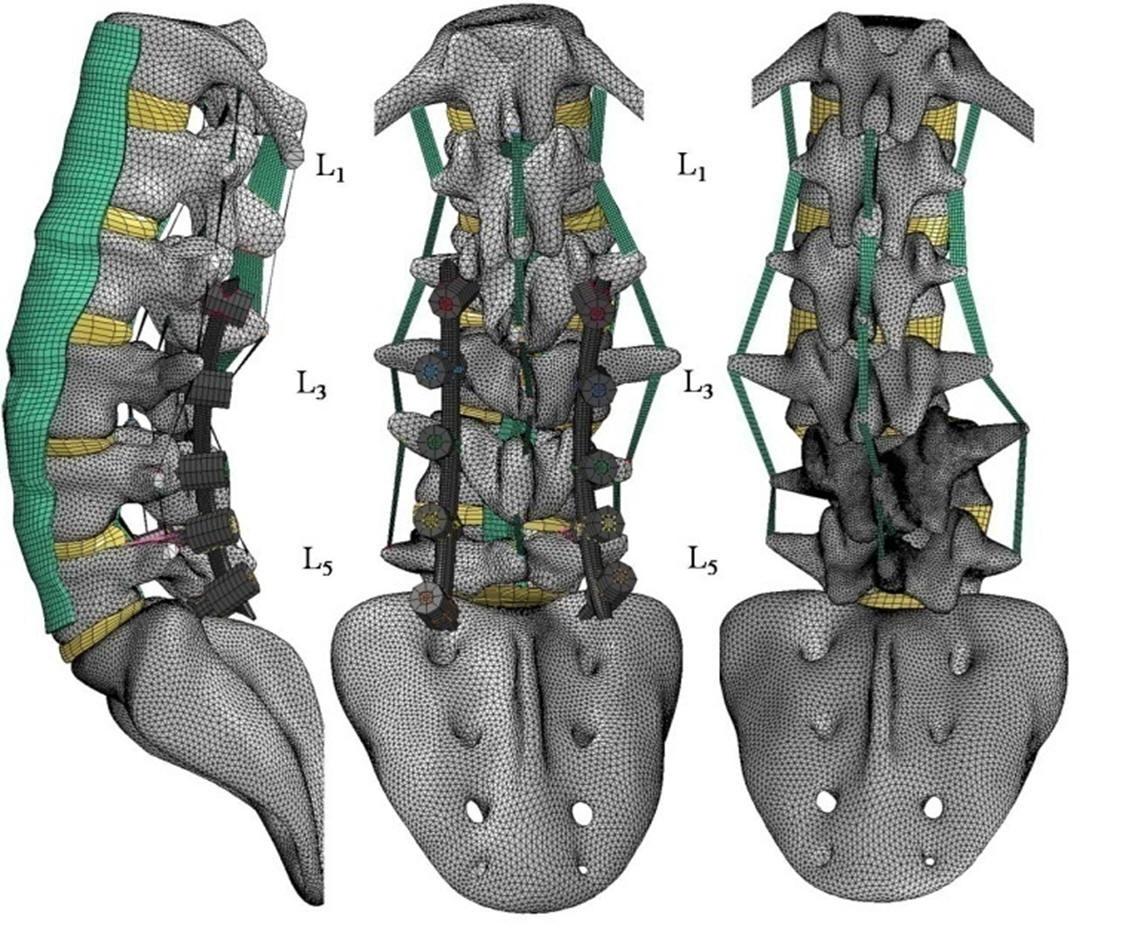
Pre- and post- scoliosis fusion surgery
scans FE models of scoliosis spine
from T12-S1 level with pedicle screws and rods at L2-S1 an
The intersegmental
rotation angle and the intradiscal pressure at level L1-2under
five different loads
|
500N
|
750N
|
1000N
|
1250N
|
1500N
|
|
Right Rotation
|
Left Rotation
|
Right Rotation
|
Left Rotation
|
Right Rotation
|
Left Rotation
|
Right Rotation
|
Left Rotation
|
Right Rotation
|
Left Rotation
|
|
Intersegmental Rotation (Degree)
|
6.465
|
6.168
|
6.974
|
6.654
|
7.214
|
7.056
|
7.694.
|
7.731
|
8.915
|
9.128
|
|
Intradiscal Pressure (Mpa)
|
1.606
|
1.656
|
1.729
|
1.836
|
1.947
|
1.918
|
2.082
|
2.145
|
2.315
|
2.286
|
|
Pedicle Screw (N)
|
79.7
|
68.5
|
96.4
|
86.1
|
140.5
|
178.2
|
284.3
|
291.7
|
308.3
|
352.4
|
|
Rod (N)
|
25.4
|
28.9
|
37.5
|
33.4
|
46.1
|
37.7
|
70.5
|
62.9
|
93.4
|
110.6
|
Fixation Methods:
    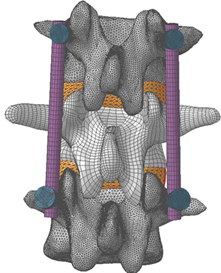 
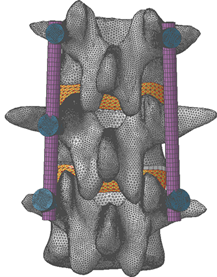     
Pedicle Subtraction
Osteotomies, Primary Rods (P), Interbody Cage (IB), (Accessory Rods (A),
Delta Rods (D), Cross Rod (C):
PSO+2P PSO+2P+IB
PSO+2P+IB+2A PSO+2P+IB+2D PSO+2P+IB+1C PSO+2P+IB+2C
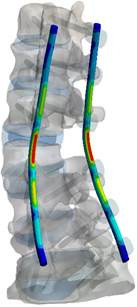 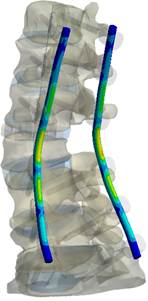   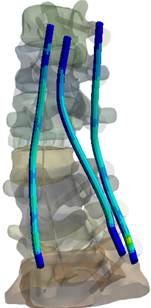 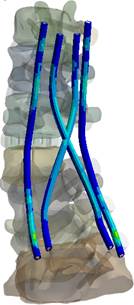
(0-300 MPa)

Maximum von Mises Stress in Rods
Publications:
1. Xu, M., Yang, J., Lieberman, I.H., and
Haddas, R., Finite Element Method-Based Study
of Pedicle Screw-Bone Interaction in Pullout Test and Physiological Spinal
Loads, Medical Engineering
and Physics,
Vol. 67, Nov., 2019, 11-21.
DOI
2. Xu, M., Yang, J.,
Lieberman, I.H., and Haddas, R., The Effect of Surgical Alignment in Adult
Scoliotic Spines on Axial Cyclic Vibration: A Finite Element Study, ASME Journal of Computing and Information
Science in Engineering, Vol. 19, June, 2019, 021006 (6 pages). DOI
3. Haddas, R., Xu, M., Lieberman, I.H., and Yang, J., Finite Element Based-Analysis
of Pre and Post Lumber Fusion for Adult Degenerative Scoliosis Patients, Spine Deformity, Vol. 7, 543-552,
2019. DOI
4. Xu, M., Yang, J., Lieberman, I.H., and
Haddas, R., Comparisons of Stress Distributions in Vertebral Bone and Pedicle
Screw and Screw-Bone Load Transfers among Different Fixation Methods of
Lumbar Spine Fusion Surgery: A Finite Element Study, Medical Engineering and Physics, 63, 2019, 26-32. DOI
5. Xu, M., Scholl, T.,
Berjano, P., Cruz, J., and Yang, J.,
Rod Stress Prediction in Spinal Alignment Surgery with
Different Supplementary Rod Constructing Techniques: A Finite Element Study, ASME 2018 International Design Engineering Technical Conference and Computers
& Information in Engineering Conference, August 26-29, 2018, Quebec
City, Canada. DOI
6. Xu, M., Yang, J., Lieberman, I.H., and
Haddas, R., Finite Element Method-Based Study for Effect of Adult
Degenerative Scoliosis on the Spinal Vibration Characteristics, Computers in Biology and Medicine,
Vol. 84, 2017, 53-58. DOI
7.
Xu, M., Yang,
J., Haddas, R., and Lieberman, I.H., Lumbar Spine Finite Element
Model for Healthy Subjects: Development and Validation, Computer Methods in Biomechanics and Biomedical Engineering, Vol.
20, Issue 1, 1-20, 2017. DOI
The research
goal in this thrust is to develop a discomfort assessment model for personal
protective equipment such as helmets, goggles, shoes, clothing, respirators,
etc.
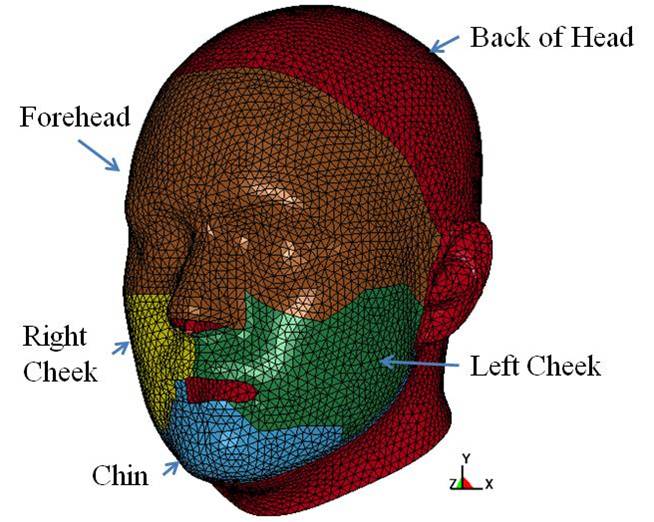

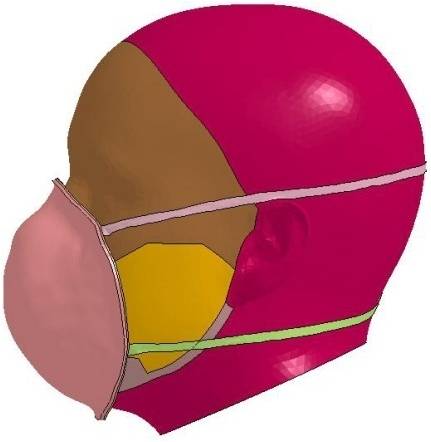 
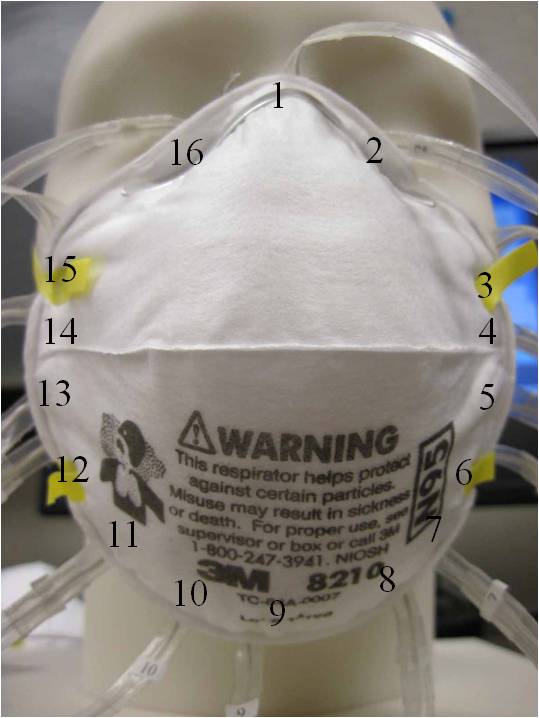
FEM Model
for the Face and the N95 Filtering Facepiece Respirator
 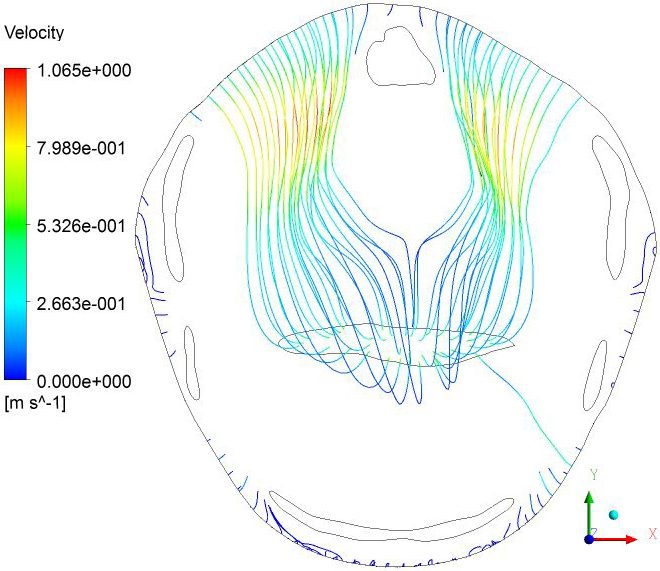 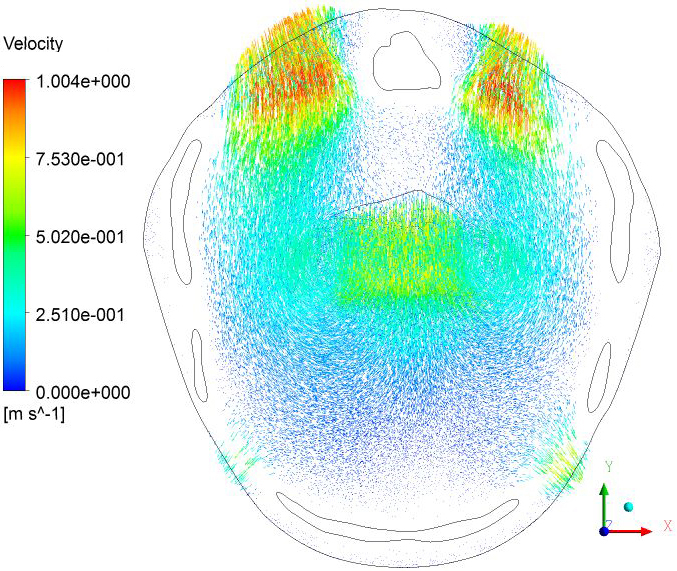 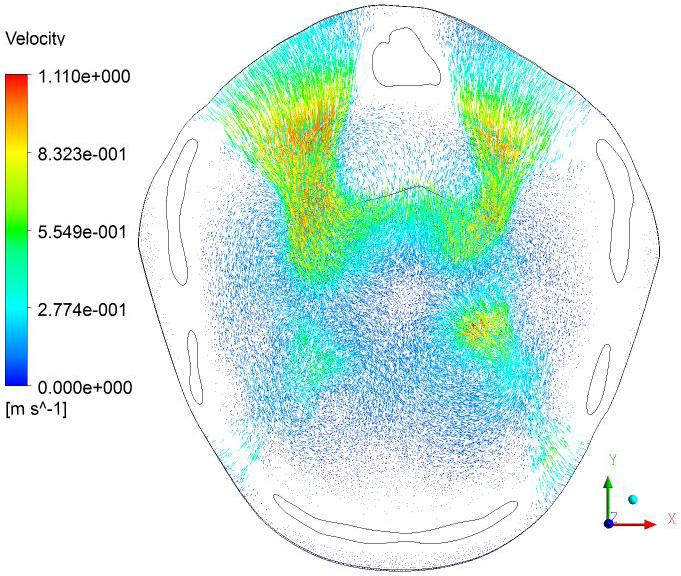
Mouth exhale
streamline
Mouth inhale
steamline
Nose exhale
velocity
Nose inhale velocity
CFD simulation
for the Face and the N95 Filtering Facepiece Respirator
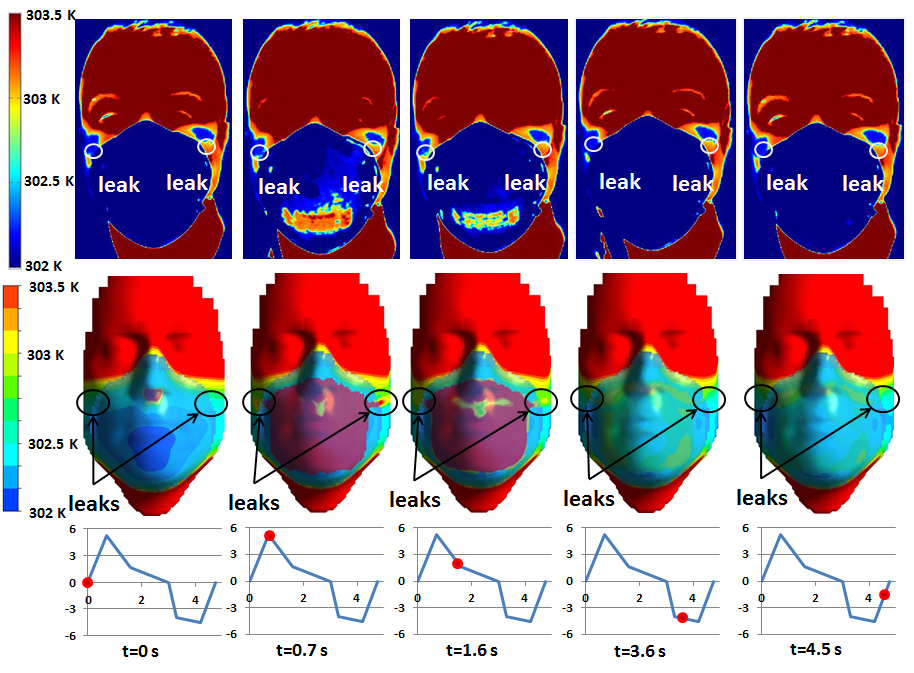
Temperature contours
through CFD simulation and Infrared Imaging for leaks
  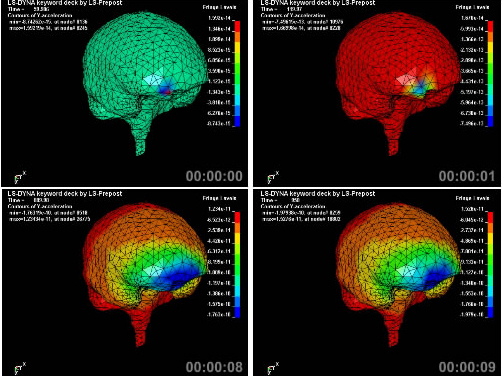
Rear Effect of Helmet from Bullet

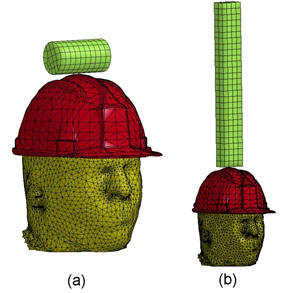
Construction Helmet
study
Publications:
1. Lei, Z., Yang, J., and Zhuang, Z., Human Face and
N95 Filtering Facepiece Respirator Interaction: Contact Pressure Simulation
and Validation, Journal of Occupational
and Environmental Hygiene, Vol. 9, Issue 1, 2012, 46-58. DOI
2. Lei, Z., Ji, X., Li, N., Yang, J., Zhuang, Z., and Rottach, D., Effect of Head
Movement on Contact Pressure between Respirators and Headforms: Part
2-Simulation, The Annals of
Occupational Hygiene, Vol. 58, Number 9, 2014, 1186-1199. DOI
3. Lei, Z., Ji, X., Li, N., Yang, J., Zhuang, Z., and Rottach, D., Effect of Head
Movement on Contact Pressure between Respirators and Headforms: Part
1-Headform Model and Validation, The
Annals of Occupational Hygiene, Vol. 58, Number 9, 2014, 1175-1185. DOI
4. Lei, Z., Yang, J., and Zhuang, Z., A
Novel Algorithm for Determining Contact Area between a Respirator and
Headform, Journal of Occupational and
Environmental Hygiene, Vol. 11, No. 4, 227-237, 2014. DOI
5. Lei, Z., and Yang, J., Computational Fluid
Dynamics-Based Respirator Fit Evaluation-A Pilot Study, Journal
of the International Society for Respiratory Protection, Vol. 30, No. 2, 105-115, 2013. DOI
6. Lei, Z., Yang, J.,
Zhuang, Z., and Roberge, R., Simulation and Validation of Respirator Faceseal
Leaks Using Computational Fluid Dynamics and Infrared Imaging, The Annals of Occupational Hygiene, Vol. 57, No. 4,
2013, 493-506. DOI
7. Lei, Z., and Yang, J., Layered Pentahedral
Mesh
Generation for Biomechanical Geometries with Unclosed Surfaces, Computer-Aided Design and Applications, Vol. 10, No. 2, 2013, 231-245. DOI
8. Lei,
Z., and Yang, J., Methodology for Simulating Air Leakages of an
N95 Filtering Facepiece Respirator-A Pilot Study,
Computer Aided
Design and Applications, Vol. 9, Issue 1,
2012, 43-53. DOI
9. Dai, J., Yang, J., and Zhuang, Z., Sensitivity Analysis of
Important Parameters Affecting Contact Pressure between a Respirator and a
Headform, International Journal of
Industrial Ergonomics, Vol. 41,
Issue 3, 2011, 268-279. DOI
10. Long, J., Yang, J.,
Lei, Z., and Liang, D., Simulation-Based Assessment for Construction Helmets,
Computer Methods in Biomechanics and
Biomedical Engineering, Vol. 18(1), 2015, 24-37. DOI
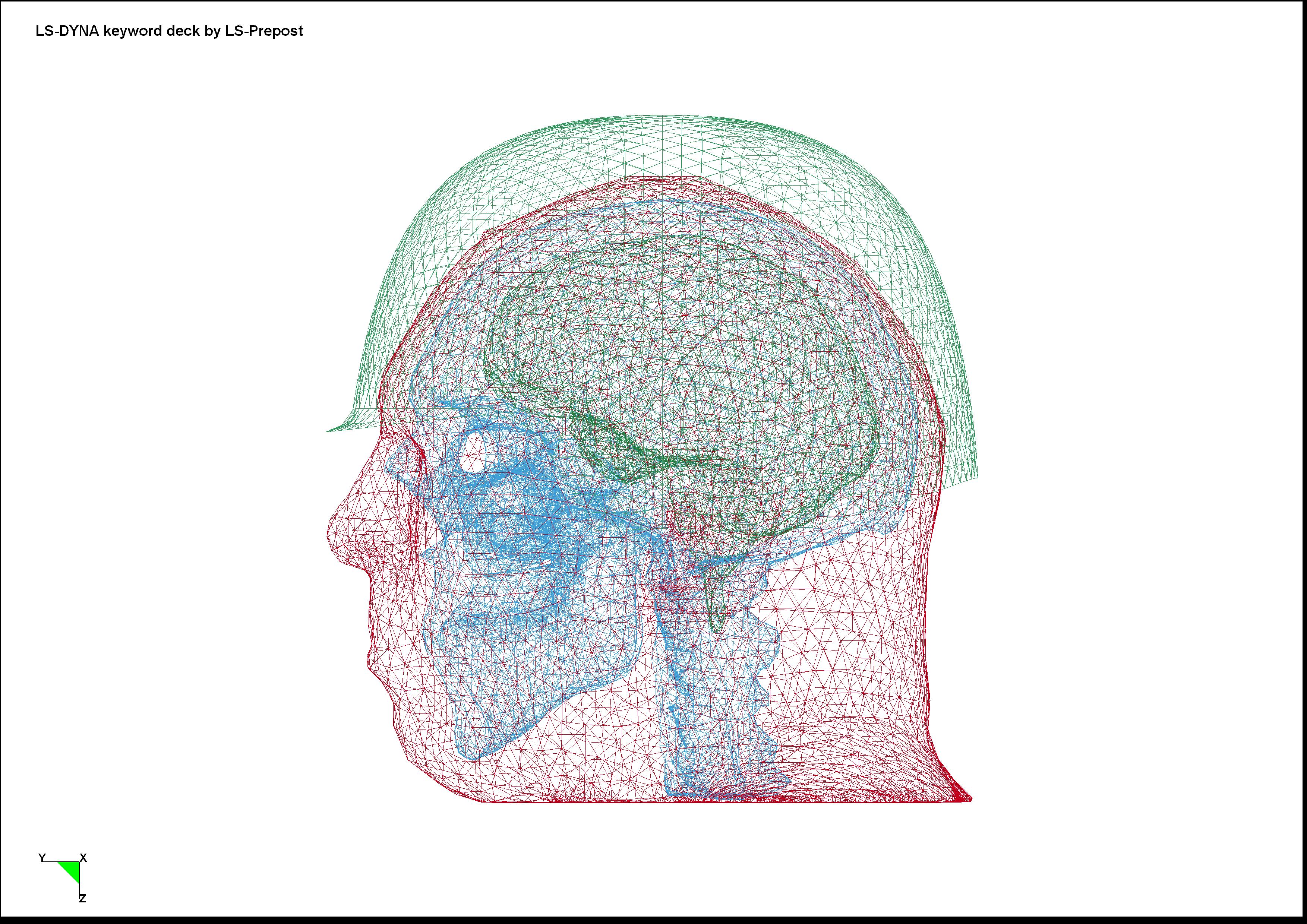
11. Yang, J.,
and Lei, Z., (2018) Human Head Modeling
and Applications. In Paul G, Scataglini S. (eds) DHM and Posturography,
Elsevier.
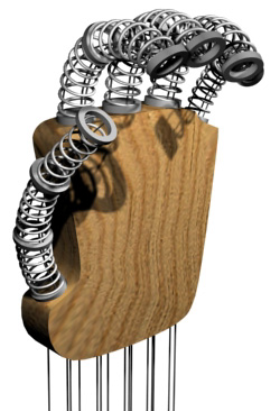
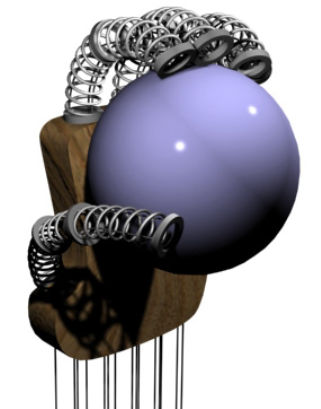
a) Continuum
Robots
The research
goal in this thrust is (1) to investigate the kinematic and dynamic aspects
of robotics or systems; (2) to synthesize medical devices or medical robots;
(3) to develop novel methodologies for motion planning, control and navigation
of robots.
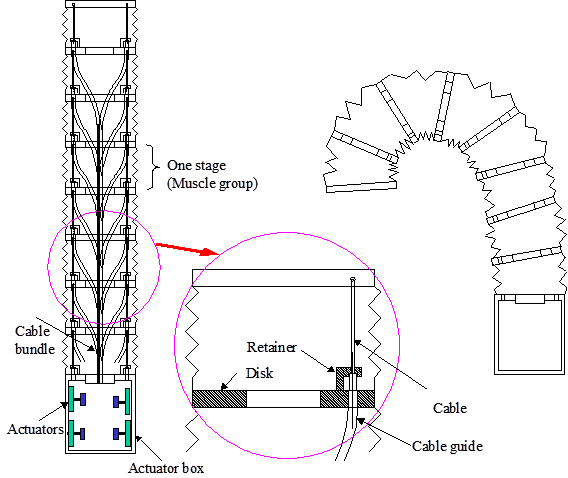 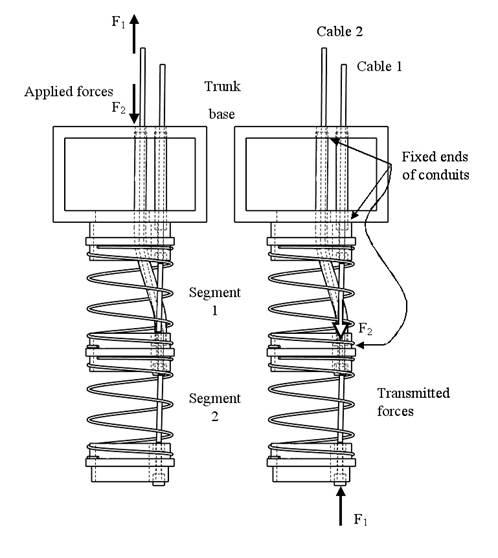 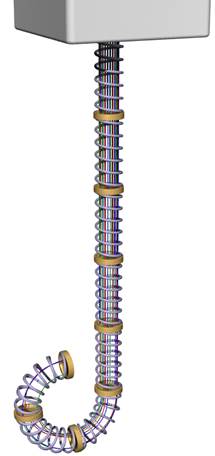   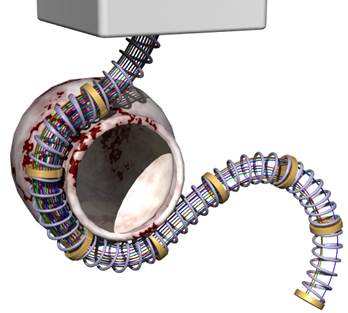
Elephant Trunk Robot
Publications:
1. Yang, J., Peña Pitarch, E., Potratz, J., Beck, S., and
Abdel-Malek, K., Synthesis and Analysis of a Flexible Elephant Trunk Robot, Advanced Robotics,
Vol. 20, No. 6, 2006, 631-659. DOI
b) Hand
Prosthesis
Hand Prosthesis
 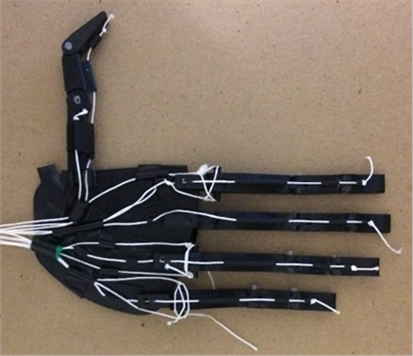 
   
3D Printed Soft Prosthetic Hand
Publications:
1. Abbot,
E., Oliveira, A., and Yang, J., Novel Design of a 3d Printed
Anthropomorphic Soft Prosthetic Hand, ASME
2020
International Design Engineering
Technical Conference and Computers & Information in Engineering Conference,
August 16-19, 2020, Sant Louis, MO, USA.
2.
Potratz, J., Yang, J., Abdel-Malek,
K., Peña Pitarch, E., and Grosland, N., A Light Weight
Compliant Hand Mechanism with High Degrees of Freedom, ASME Journal of Biomechanical
Engineering, Vol. 127, 6, 2005, 934-945. DOI
3.
Yang, J., Pena Pitarch, E., Abdel-Malek, K., Patrick, A., and Lindkvist, L., A
Multi-Fingered Hand Prosthesis, Mechanism and Machine Theory, Vol. 39,
Issue 6, 2004, 555-581. DOI
4. Yang, J., Abdel-Malek, K., and Zhang, Y., On the Workspace
Boundary Determination of Serial Manipulators with Non-unilateral
Constraints, Robotics and Computer-Integrated Manufacturing, Vol. 24,
No. 1, 2008, 60-76. DOI
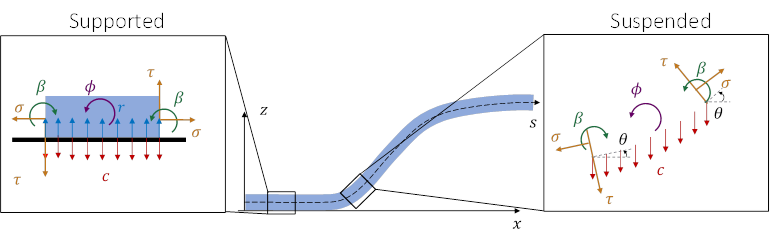
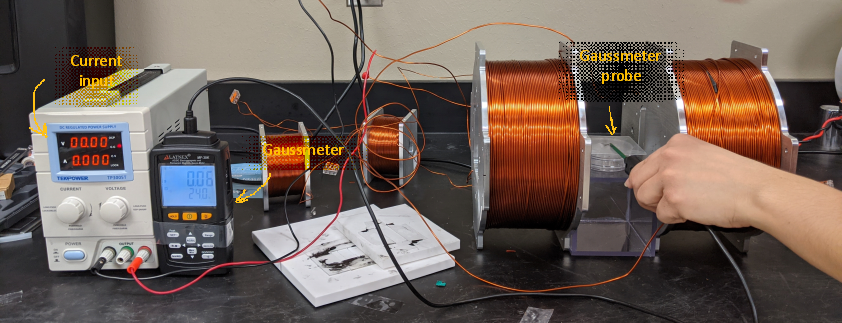
c) Soft
Robots
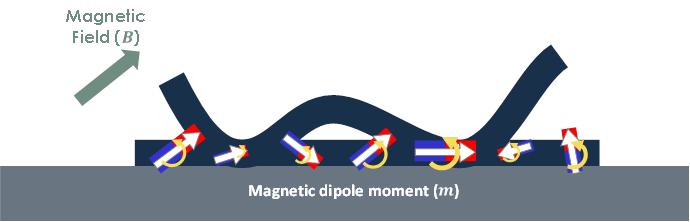 
Publications:
1. Oliveira, A., Kashem,
M. N. H., Luna, D., Geerts, W., Li, W., and Yang, J., Magnetic Properties of PDMS Embedded with Strontium
Ferrite Particles Cured Under Different Magnetic Field Configurations,
(accepted) AIP Advances. DOI
2. Oliveira, A.,
Bhattacharya, S., and Yang, J.,
Mechanics of Magnetic Robots akin
to Soft Beams Supported at Unanchored Contacts, ASME Journal of
Applied Mechanics, Vol. 88, 2021, 121005
(11 pages). DOI
3. Oliveira, A., and Yang, J., Review of
Magnetically Actuated Milli/Micro-Scale Robots Locomotion and Features, Critical Reviews in Biomedical Engineering,
47(5), 379-394, 2019. DOI
- Computer-Aided Design and Simulation of Mechanical
Systems
The
objective in this area is to develop new methodologies to advance CAD and
simulation of mechanisms.
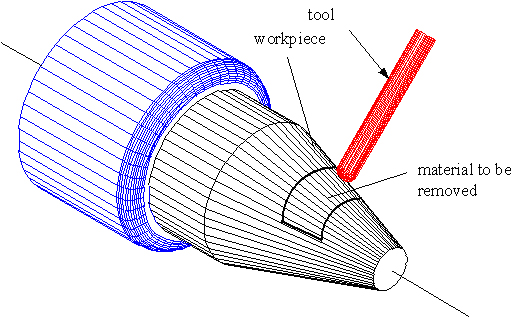    
NC Machining
Verification
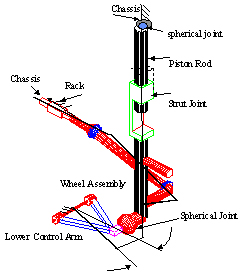
Suspension System
Publications:
1.
Yang, J., and Abdel-Malek, K., Design Propagation in Kinematics of Mechanical
Systems, Mechanism and Machine Theory, Vol. 42, No. 7, 2007, 807-824. DOI
2.
Abdel-Malek, K., and Yang, J.,
The Method of Cut-Joint Kinematic Constraint: Velocity Propagations, International
Journal of Advanced Manufacturing Technology, Vol. 31, No. 7-8, 2007,
815-824. DOI
3.
Yang, J., and Abdel-Malek, K., Verification of NC Machining Processes Using
Swept Volumes, International Journal of Advanced Manufacturing Technology,
Vol. 28, No. 1-2, 2006, 82-91. DOI
4. Abdel-Malek, K, Yang,
J., Blackmore, D., and Joy, K., Swept Volumes: Foundations,
Perspectives, and Applications, International Journal of Shape Modeling,
Vol. 12, No. 1, 2006, 87-127. DOI
-
Autonomous
Vehicles
Publications:
1.
Negash, N., Tang, S-X, Yang, J., IT2-Fuzzy Neural Network
Based Prescribed Performance Fault Tolerant Backstepping Sliding Mode Control
for Automated Platnoon with an Exponential Spacing Policy, (under review). DOI
2.
Negash, N., Yang, J., Safe Autonomous
Vehicle Cooperative Cruise Control with Deep Reinforcement Learning, ASME
2023 IDETC/CIE, August 20-23, 2023, Boston, Massachusetts, USA.
3.
Negash, N., and Yang, J., Coupled Integral
Sliding Mode Control for Bidirectional Automated Platoon with an Exponential
Spacing Policy and Uncertainty Approximation, ASME 2022 International
Design Engineering Technical Conference and Computers & Information in
Engineering Conference, August 14-17, 2022, St. Louis, MO, USA.
4.
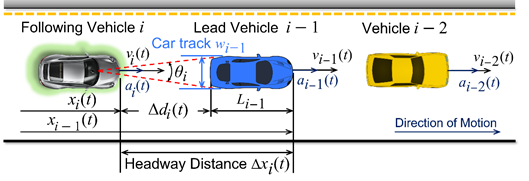
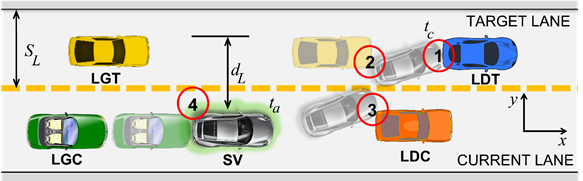
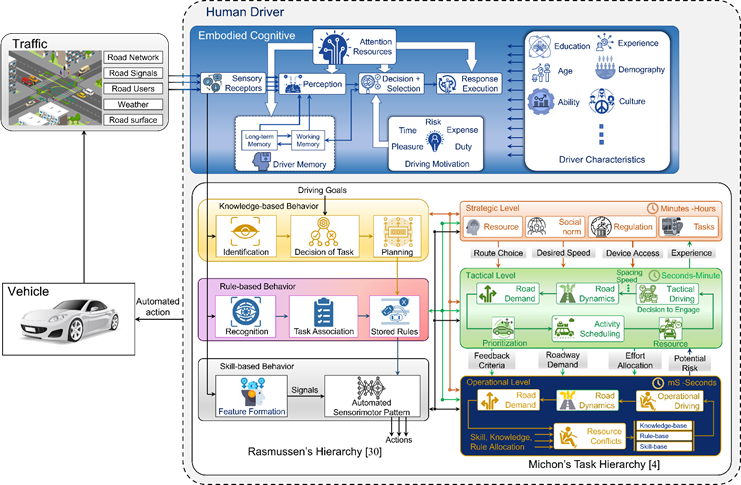
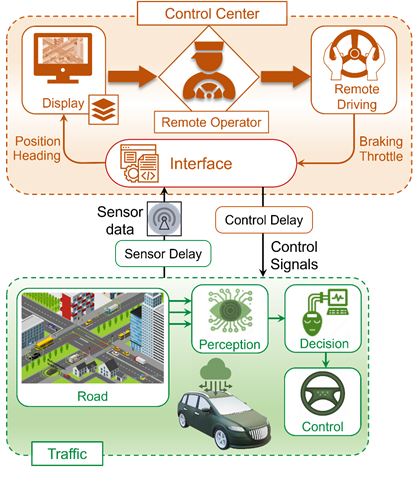
Negash, N., and Yang, J., Driver Behavior
Modeling towards Autonomous Vehicles: A Comprehensive Review, IEEE Access, Vol. 11, 2023, 22788-22821. DOI
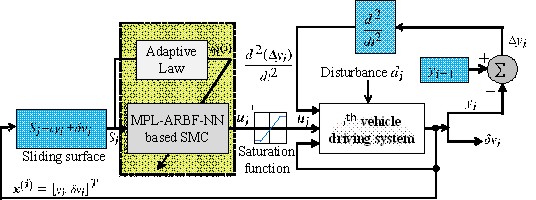
5.
Negash, N., and Yang, J., Anticipation-Based Autonomous Platoon Control Strategy
with Minimum Parameter Learning Adaptive Radial Basis Function Neural Network
Sliding Mode Control, SAE International Journal of Vehicle
Dynamics, Stability and NVH, 6(3), 1-19, 2022. DOI
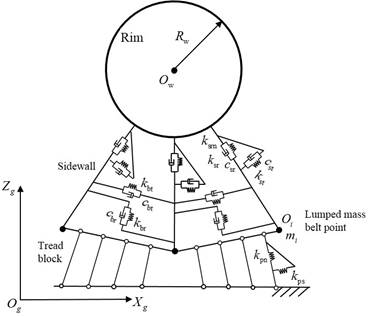
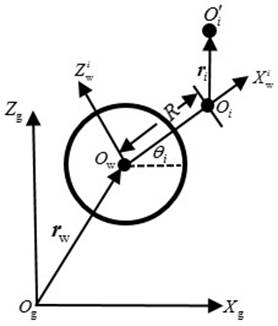
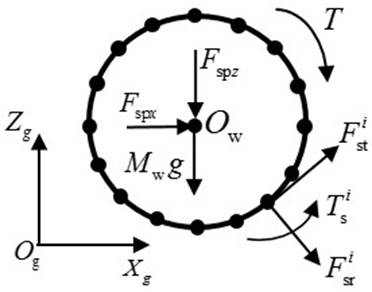
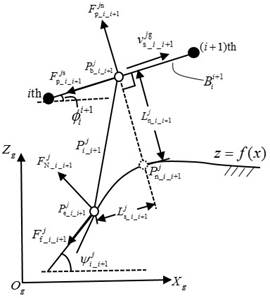
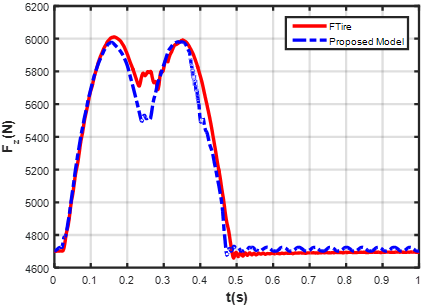
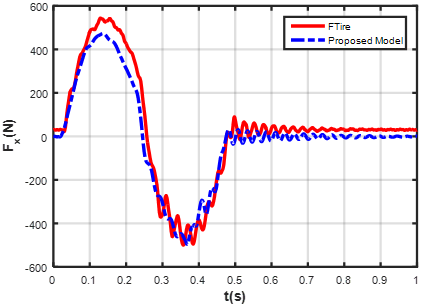
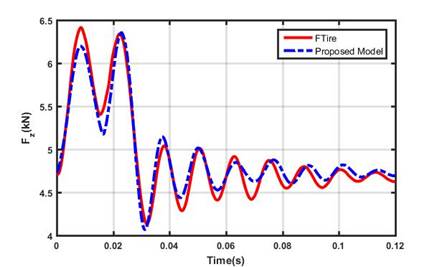
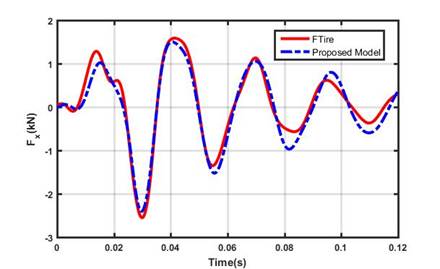
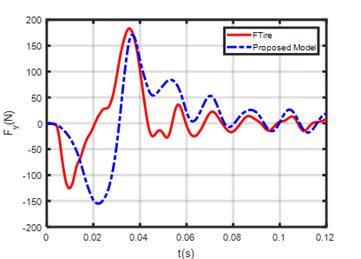
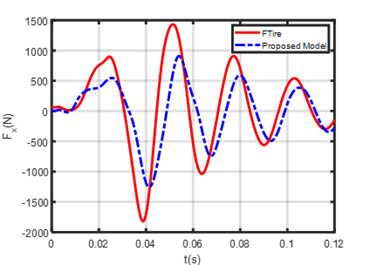
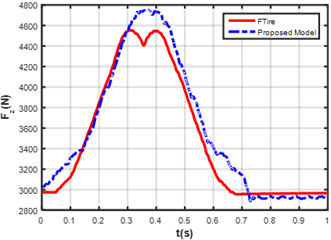
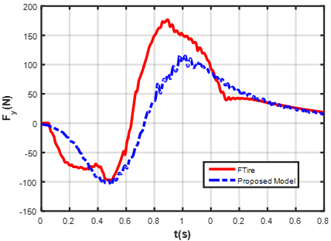
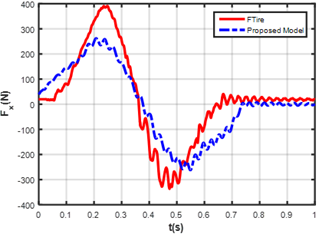
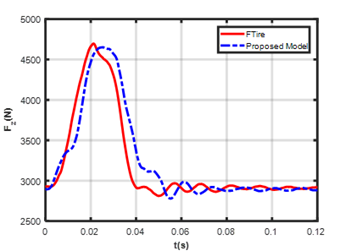
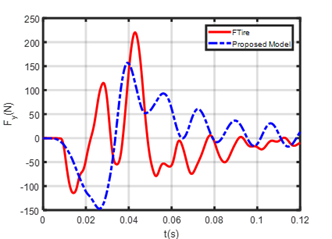
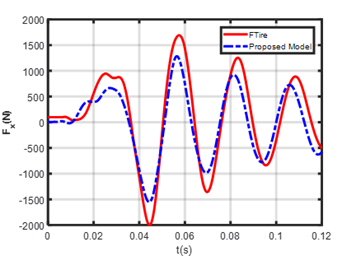
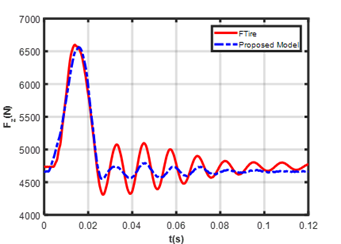
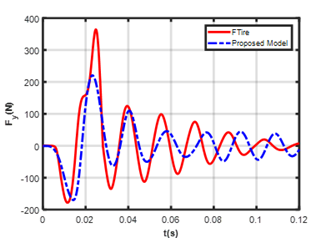
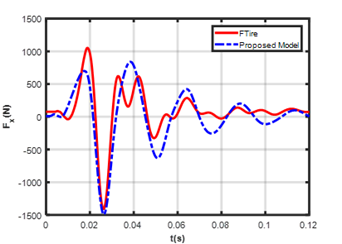
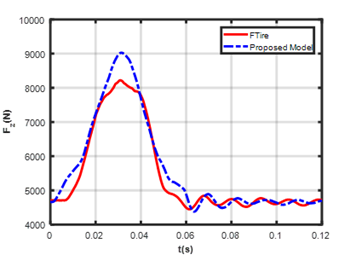
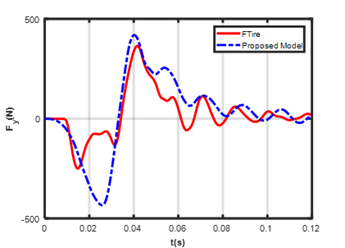
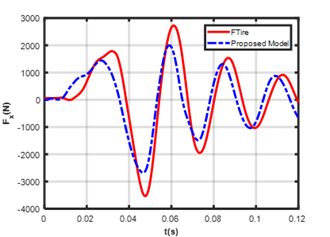
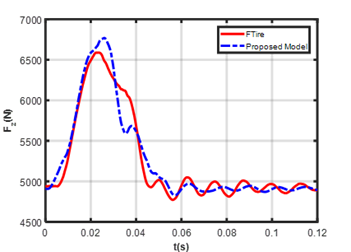
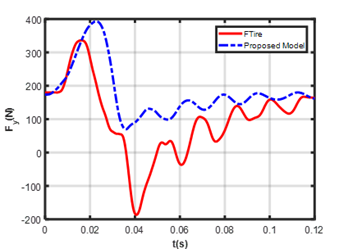
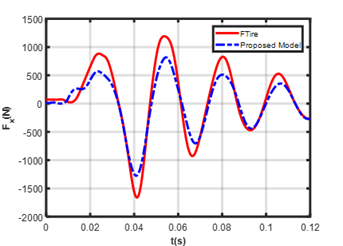
-
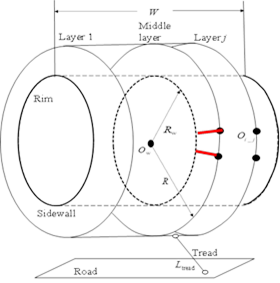
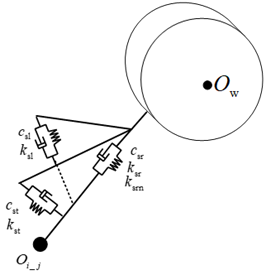
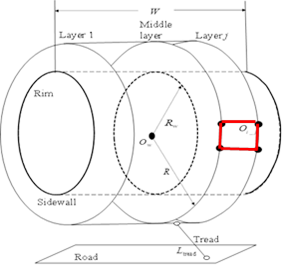
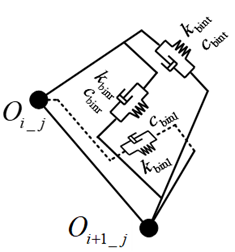
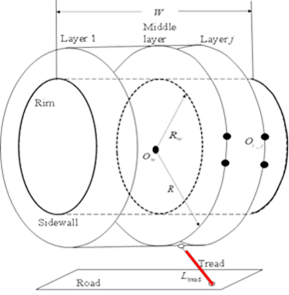
Tire
Modeling: Flexible Ring Tire Model
In-Plane Flexible Ring Tire Model
Quasi-Static
v=2km/h
Dynamic
v=30km/h
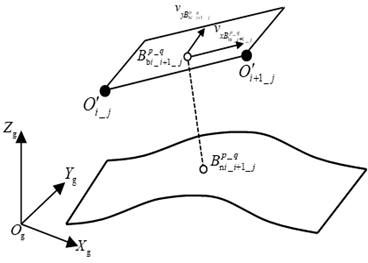
Out-of-Plane Model
     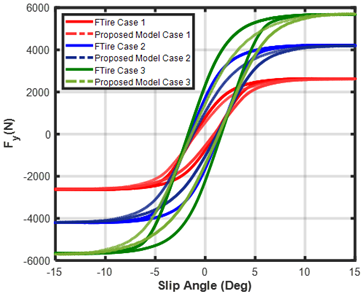 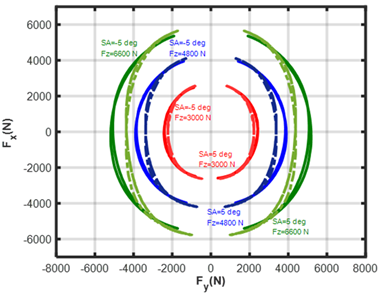
Acceleration/Braking
Test
Cornering Test Combined
Slip Test
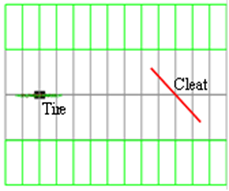
In-Plane Cleat Tests:
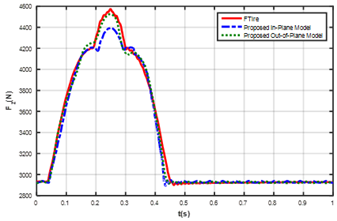 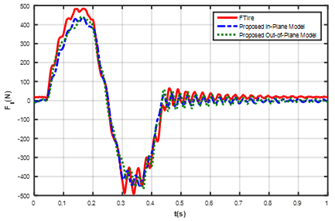 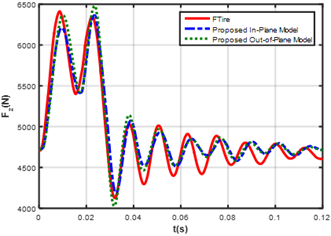 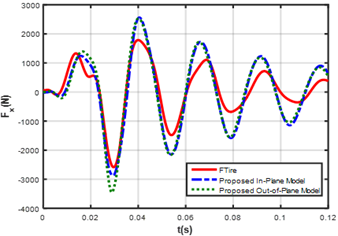
Quasi-Static
Test
Dynamic Test
Out-of-Plane Cleat Tests:
Quasi-Static Test: 2km/h,
Static Load: 4800N, Cleat height: 0.01m, Cleat Angle: 45 degrees, Tire
camber: 0
 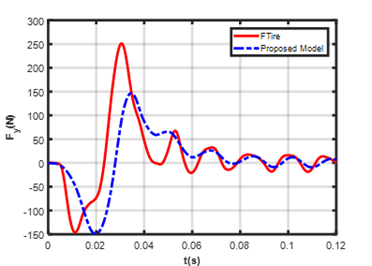 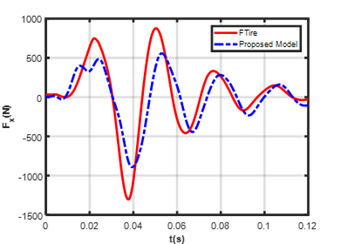
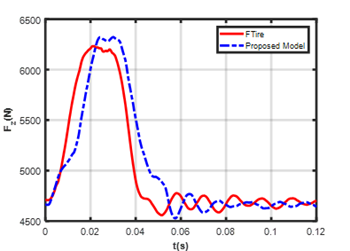
Dynamic Cleat Test:
V=30km/h, Static Load: 3000N, Cleat height: 0.01m, Cleat Angle: 45 degrees,
Tire camber: 0
Dynamic Cleat Test:
V=30km/h, Static Load: 6000N, Cleat height: 0.01m, Cleat Angle: 45 degrees,
Tire camber: 0
Dynamic
Cleat Test: V=60km/h, Static Load: 4800N, Cleat height: 0.01m, Cleat Angle:
45 degrees, Tire camber: 0
Dynamic Cleat Test:
V=30km/h, Static Load: 4800N, Cleat height: 0.02m, Cleat Angle: 45 degrees,
Tire camber: 0
Dynamic Cleat Test:
V=30km/h, Static Load: 4800N, Cleat height: 0.01m, Cleat Angle: 45 degrees,
Tire camber: 4 degrees
Publications:
1.
Li, B., Yang, X., and Yang,
J., Out-of-Plane
Tire Model Development for Vehicle Dynamic Simulation on Various Rigid Road
Surfaces, (in press) International Journal of Vehicle Performance. DOI
2. Li, B., Yang, X., Yang,
J., Zhang, Y., and Ma, Z., In-Plane Flexible Ring Tire Model
Parameter Identification: Optimization Algorithms, SAE International Journal of Vehicle Dynamics, Stability and NVH,
2(1): 2018, 1-17. DOI
3.
Li, B., Yang,
X., Yang, J., Zhang, Y.,
and Ma, Z., In-Plane Flexible Ring Tire Model-Part 2: Parameterization, Tire Science and Technology, TSTCA,
Vol. 46, No. 3, July–September 2018, 220-240. DOI
4.
Li, B., Yang,
X., Yang, J., Zhang, Y.,
and Ma, Z., In-Plane Flexible Ring Tire Model-Part 1: Model Development and
Validation, Tire Science and Technology,
TSTCA, Vol. 46, No. 3, July–September 2018, 174-219. DOI
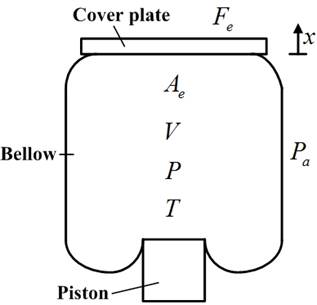
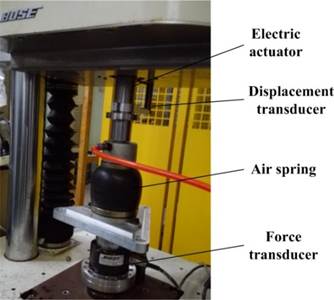
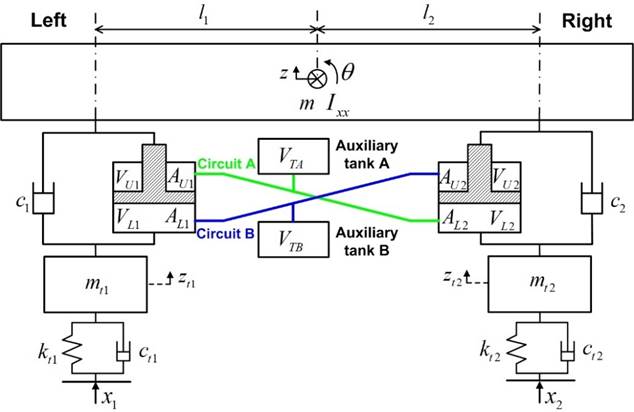
-
Air Spring
Modeling
  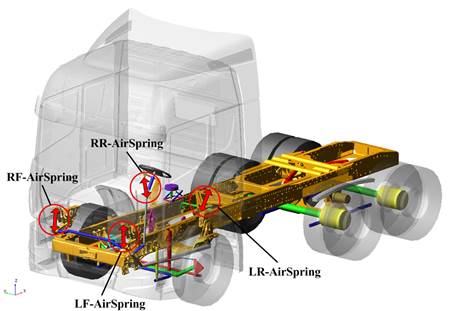
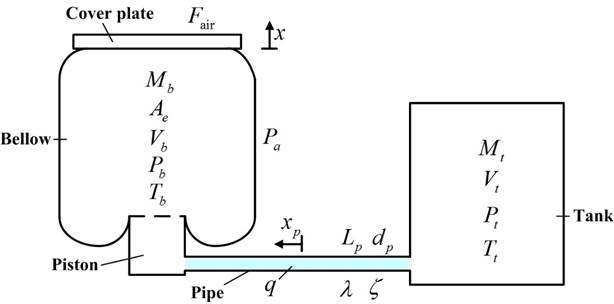 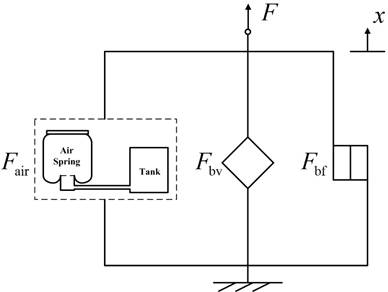 
Publications:
1. Zhu, H., Yang, J., and Zhang, Y.,
Dual-Chamber Pneumatically Interconnected Suspension: Modeling and
Theoretical Analysis, (in press) Mechanical Systems and Signal Processing.
DOI
2.
Zhu, H., Yang,
J., and Zhang, Y., Modeling and Optimization for Pneumatically
Pitch-Interconnected Suspensions of a Vehicle, Journal of Sound and Vibration, Vol. 432, 2018, 290-309. DOI
3. Zhu, H., Yang, J., Zhang, Y., Feng, X.,
A Novel Air Spring Dynamic Model with
Pneumatic Thermodynamics, Effective Friction and Viscoelastic Damping, Journal of Sound and Vibration, Vol.
408, 2017, 87-104. DOI
4. Zhu, H., Yang, J., Zhang, Y., Feng, X.,
and Ma, Z., Nonlinear Dynamic Model of Air Spring with a Damper for Vehicle
Ride Comfort, Nonlinear Dynamics,
Vol. 89, Issue 2, 2017, 1545-1568. DOI
-
Contact
between the Roller and Guide with Clearances (Sliding Door System)
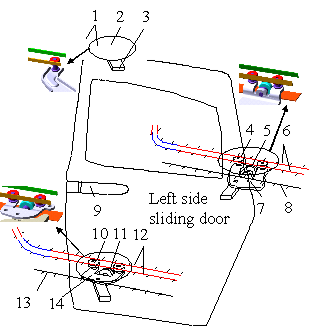 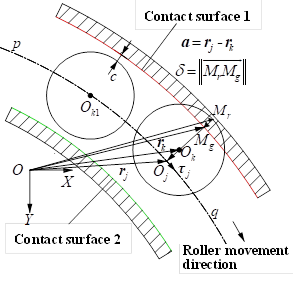 
Publications:
1. Gao, Y.,
Duan, Y., Yang, J., Yuan,
Z., and Ma, C., Hybrid
Contact Force Model for the Planar Joint with
Clearances between the Guide and Nylon-Covered Roller. (under review) DOI
2. Gao, Y.,
Duan, Y., Yang, J., Yuan,
Z., and Ma, C., Improved
K-Medoids Algorithm-Based Clustering Analysis for Handle Driving Force in
Automotive Manual Sliding Door Closing Process, (in press) Proceedings of
the Institution of Mechanical Engineers, Part D: Journal of Automotive
Engineering. DOI
3. Gao, Y.,
Duan, Y., Yang, J., Yuan,
Z., and Ma, C., Modeling Planar Joints with Clearance between the Guide and
Roller in Mechanisms, ASME Journal of
Computational Nonlinear Dynamics, 15(1), Jan. 2020, 011010 (10 pages). DOI
|